Particle Filter
Estimate states of discrete-time nonlinear system using particle filter
Libraries:
Control System Toolbox /
State Estimation
System Identification Toolbox /
Estimators
Description
The Particle Filter block estimates the states of a discrete-time nonlinear system using the discrete-time particle filter algorithm.
Consider a plant with states x, input u, output m, process noise w, and measurement y. Assume that you can represent the plant as a nonlinear system.
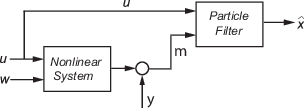
The algorithm computes the state estimates of the nonlinear system using the state transition and measurement likelihood functions you specify.
You create the nonlinear state transition function and measurement likelihood functions for the system and specify these functions in the block. The block supports state estimation of a system with multiple sensors that are operating at different sampling rates. You can specify up to five measurement likelihood functions, each corresponding to a sensor in the system.
Examples
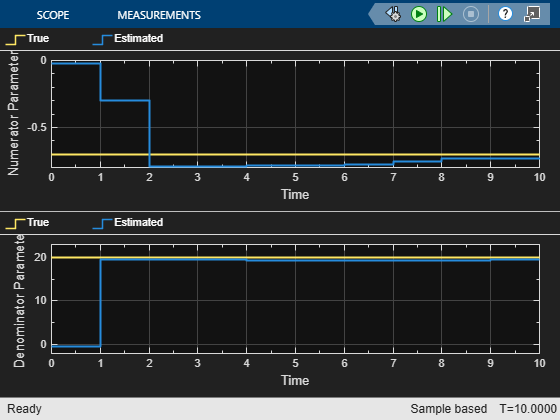
Parameter and State Estimation in Simulink Using Particle Filter Block
Demonstrates the use of Particle Filter block in Control System Toolbox™. A discrete-time transfer function parameter estimation problem is reformulated and recursively solved as a state estimation problem.
Ports
Input
Measured system outputs corresponding to each measurement likelihood function that you specify in the block. The number of ports equals the number of measurement likelihood functions in your system. You can specify up to five measurement likelihood functions. For example, if your system has two sensors, you specify two measurement likelihood functions in the block. The first port y1 is available by default. Click Add Measurement, to generate port y2 corresponding to the second measurement likelihood function.
Specify the ports as N-dimensional vectors, where N is the number of quantities measured by the corresponding sensor. For example, if your system has one sensor that measures the position and velocity of an object, then there is only one port y1. The port is specified as a two-dimensional vector with values corresponding to position and velocity.
Dependencies
The first port y1 is available by default. To generate ports y2 to y5, click Add Measurement.
Optional input argument to the state transition function
f other than the state
x.
If you create f using a MATLAB® function (.m file), the software
generates the port StateTransitionFcnInputs when
you enter the name of your function, and click
Apply.
If your state transition function has more than one additional input, use a Simulink Function (Simulink) block to specify the function. When you use a Simulink Function block, you provide the additional inputs directly to the Simulink Function block using Inport (Simulink) blocks. No input ports are generated for the additional inputs in the Particle Filter block.
Dependencies
To generate this port, both of the following conditions should be satisfied:
You specify
fin Function using a MATLAB function, andfis on the MATLAB path.frequires only one additional input argument apart from particles.
Optional inputs to the measurement likelihood functions other than the
state x and measurement y.
MeasurementLikelihoodFcn1Inputs corresponds to the first measurement likelihood function that you specify, and so on.
If you specify two measurement inputs using MATLAB functions (.m files) in
Function, the software generates ports
MeasurementLikelihoodFcn1Inputs and
MeasurementLikelihoodFcn2Inputs when you click
Apply. You can specify the inputs to these
ports as scalars, vectors, or matrices.
If your measurement likelihood functions have more than one additional input, use Simulink Function (Simulink) blocks to specify the functions. When you use a Simulink Function block, you provide the additional inputs directly to the Simulink Function block using Inport (Simulink) blocks. No input ports are generated for the additional inputs in the Particle Filter block.
Dependencies
To generate a port corresponding to a measurement likelihood
function h, both of the following conditions
should be satisfied:
You specify measurement input
hin Function using a MATLAB function, andhis on the MATLAB path.hrequires only one additional input argument apart from particles and measurement.
Enable correction of estimated states when measured data is available.
For example, consider that measured output data is not available at
all time points at the port y1 that corresponds to
the first measurement likelihood function. Then, use a signal value
other than 0 at the Enable1 port
to enable the correction of estimated states when measured data is
available. Specify the port value as 0 when measured
data is not available. Similarly, if measured output data is not
available at all time points at the port
yi for the
ith measurement
likelihood function, specify the corresponding port
Enablei as a
value other than 0.
Dependencies
To generate a port corresponding to a measurement likelihood function, select Add Enable port for that measurement likelihood function. The port appears when you click Apply.
Output
Estimated states, returned as a vector of size Ns, where Ns is the number of states of the system. To access the individual states, use the Selector (Simulink) block.
When the Use the current measurements to improve state
estimates parameter is selected, the block outputs the
corrected state estimate at time step k, estimated using
measured outputs until time k. If you clear this
parameter, the block returns the predicted state estimate for time k, estimated using
measured output until a previous time k-1. Clear this
parameter if your filter is in a feedback loop and there is an algebraic
loop in your Simulink® model.
State estimation error covariance, returned as an Ns-by-Ns matrix, where Ns is the number of states of the system. To access the individual covariances, use the Selector (Simulink) block.
You can output the error covariance only if you select Output state estimation error covariance in the Block outputs, Multirate tab, and click Apply.
Dependencies
To enable this parameter, set the State estimation
method parameter in the Block outputs,
Multirate tab to 'Mean'.
Particle values used for state estimation, returned as an Ns-by-Np or Np-by-Ns array. Ns is the number of states of the system, and Np is the number of particles.
If the
StateOrientationparameter is specified as'column', then Particles is returned as an Ns-by-Np array.If the
StateOrientationparameter is specified as'row', then Particles is returned as an Np-by-Ns array.
Dependencies
To generate this port, select Output all particles in the Block outputs, Multirate tab, and click Apply.
Particle weights used for state estimation, returned as a 1-by-Np or Np-by-1 vector, where Np is the number of particles used for state estimation.
If the
StateOrientationparameter is specified as'column', then Weights is returned as a 1-by-Np vector, where each weight is associated with the particle in the same column in theParticlesarray.If the
StateOrientationparameter is specified as'row', then Weights is returned as a Np-by-1 vector, where each weight is associated with the particle in the same row in theParticlesarray.
Dependencies
To generate this port, select Output weights in the Block outputs, Multirate tab, and click Apply.
Parameters
System Model Tab
State Transition
The particle filter state transition function calculates the particles at time step k+1, given particles at time step k per the dynamics of your system and process noise. This function has the syntax:
particlesNext = f(particles, param1, param2, ...)
where, particles and
particlesNext have dimensions
Ns-by-Np if State
Orientation is specified as 'column',
or Np-by-Ns if State
Orientation is specified as 'row'.
Also, param_i represents optional input arguments you
may specify. For more information on optional input arguments, see StateTransitionFcnInputs.
You create the state transition function and specify the function name
in Function. For example, if
vdpParticleFilterStateFcn.m is the state
transition function that you created and saved, specify
Function as
'vdpParticleFilterStateFcn'.
You can create Function using a Simulink Function (Simulink) block or
as a MATLAB function (.m file).
Programmatic Use
Block Parameter:
StateTransitionFcn |
| Type: character vector, string |
Default:
'vdpParticleFilterStateFcn' |
Initialization
Number of particles used in the filter, specified as a positive scalar integer. Each particle represents a state hypothesis in the system. A higher number of particles increases the state estimation accuracy, but also increases the computational effort required to run the filter.
Programmatic Use
Block Parameter:
NumberOfParticles |
| Type: positive scalar integer |
Default:
1000 |
Initial distribution of particles, specified as
'Gaussian', 'Uniform', or
'Custom'.
If you choose 'Gaussian', the initial set of
particles or state hypotheses are distributed per the multivariate
Gaussian distribution, where you specify the Mean
and Covariance. The initial weight of all particles
is assumed to be equal.
If you choose 'Uniform', the initial set of
particles are distributed per the uniform distribution, where you
specify the upper and lower State bounds. The
initial weight of all particles is assumed to be equal.
'Custom' allows you to specify your own set of
initial particles and their weights. You can use arbitrary probability
distributions for Particles and
Weights to initialize the filter.
Programmatic Use
Block Parameter:
InitialDistribution |
| Type: character vector |
Values:
'Gaussian',
'Uniform',
'Custom' |
Default:
'Gaussian' |
Initial mean value of particles, specified as a vector. The number of states to be estimated defines the length of the vector.
Dependencies
To enable this parameter, set the
Distribution parameter in the
System model tab to
Gaussian.
Programmatic Use
Block Parameter:
InitialMean |
| Type: array |
Default:
[0,0] |
Initial covariance of particles, specified as a scalar, vector, or matrix.
If Covariance is specified as:
A scalar, then it must be positive. The covariance is assumed to be a [Ns Ns] matrix with this scalar on the diagonals. Here, Ns is the number of states.
A vector, then each element must be positive. The covariance is assumed to be a [Ns Ns] matrix with the elements of the vector on the diagonals.
A matrix, then it must be positive semidefinite.
Dependencies
To enable this parameter, set the
Distribution parameter in the
System model tab to
Gaussian.
Programmatic Use
Block Parameter:
InitialCovariance |
| Type: scalar, vector, or matrix |
Default:
1 |
Circular variables used for state estimation, specified as a scalar, or Ns-element vector, where Ns is the number of states.
If Circular Variables is specified as a scalar,
the software extends it to a vector where each element is equal to this
scalar. Circular (or angular) distributions use a probability density
function with a range of [-π
π]. Use circular variables if some of the states in
your system represent angular quantities like the orientation of an
object.
Programmatic Use
Block Parameter:
CircularVariables |
| Type: scalar, vector |
Default:
0 |
Orientation of system states, specified as 'column'
or 'row'.
If State Orientation is specified as:
'column', then the first input argument to the state transition and measurement likelihood function is [Ns Np]. In this case, ith column of this matrix is the ith particle (state hypothesis). Also, the states estimates xhat is output as a [Ns 1] vector. Here, Ns is the number of states, and Np is the number of particles.'row', then the first input argument to the state transition and measurement likelihood function is [Np Ns], and each row of this matrix contains a particle. Also, the states estimates xhat is output as a [1 Ns] vector.
Programmatic Use
Block Parameter:
StateOrientation |
| Type: character vector |
Values:
'column',
'row' |
Default:
'column' |
Initial bounds on system states, specified as an Ns-by-2 array, where Ns is the number of states.
The ith row lists the lower and upper bound of the uniform distribution for the initial distribution of particles of the ith state.
Dependencies
To enable this parameter, set the
Distribution parameter in the
System model tab to
Uniform.
Programmatic Use
Block Parameter:
InitialStateBounds |
| Type: array |
Default: [-3 3;-3
3] |
Custom particle distribution for state estimation, specified as an Ns-by-Np or Np-by-Ns array. Ns is the number of states of the system, and Np is the number of particles.
You choose a distribution, create a probability distribution object
for it using the makedist function, and generate
particles of the desired distribution using the
random function.
If the
StateOrientationparameter is'column', then specify Particles as an Ns-by-Np array.For example,
pd = makedist('Poisson'); Particles = random(pd,Ns,Np);If the
StateOrientationparameter is'row', then specify Particles as an Np-by-Ns array.For example,
pd = makedist('Poisson'); Particles = random(pd,Np,Ns);
Dependencies
To enable this parameter, set the
Distribution parameter in the
System model tab to
Custom.
Programmatic Use
Block Parameter:
InitialParticles |
| Type: array |
Default:
[] |
Custom particle weight values for state estimation, specified as a 1-by-Np or Np-by-1 vector of positive values, where Np is the number of particles used for state estimation.
If the
StateOrientationparameter is'column', then specify Weights as a 1-by-Np vector. Each weight in the vector is associated with the particle in the same column in theParticlesarray.For example,
Weights = ones(1,Np)/Np;
If the
StateOrientationparameter is'row', then specify Weights as a Np-by-1 vector. Each weight in the vector is associated with the particle in the same row in theParticlesarray.For example,
Weights = ones(Np,1)/Np;
Dependencies
To enable this parameter, set the
Distribution parameter in the
System model tab to
Custom.
Programmatic Use
Block Parameter:
InitialWeights |
| Type: vector of positive values |
Default:
[] |
Measurement
The measurement likelihood function calculates the likelihood of particles (state hypotheses) using the sensor measurements. For each state hypothesis (particle), the function first calculates an Nm-element measurement hypothesis vector. Then the likelihood of each measurement hypothesis is calculated based on the sensor measurement and the measurement noise probability distribution. This function has the syntax:
likelihood = h(particles, measurement, param1, param2, ...)
'column',
or Np-by-Ns if State
Orientation is specified as 'row'.
measurement is an Nm-element
vector where, Nm is the number of measurements your
sensor provides. param_i represents optional input
arguments you may specify. For more information on optional input
arguments, see MeasurementLikelihoodFcn1Inputs,...,MeasurementLikelihoodFcn5Inputs.You create the measurement likelihood function and specify the
function name in Function. For example, if
vdpMeasurementLikelihoodFcn.m is the measurement
likelihood function that you created and saved, specify
Function as
'vdpMeasurementLikelihoodFcn'.
You can create Function using a Simulink Function (Simulink) block or
as a MATLAB function (.m file).
You can use a MATLAB function only if h has zero or one additional input argument
param_iother than Particles and Measurement.The software generates an additional input port MeasurementLikelihoodFcn
iInputs to specify this argument for the ith measurement likelihood function, and click Apply.If you are using a Simulink Function block, specify
xandyusing Argument Inport (Simulink) blocks and the additional inputsparam_iusing Inport (Simulink) blocks in the Simulink Function block. You do not provideparam_ito the Particle Filter block.
If you have multiple sensors in your system, you can specify multiple measurement likelihood functions. You can specify up to five measurement likelihood functions using the Add Measurement button. To remove measurement likelihood functions, use Remove Measurement.
Programmatic Use
Block Parameter:
MeasurementLikelihoodFcn1,
MeasurementLikelihoodFcn2,
MeasurementLikelihoodFcn3,
MeasurementLikelihoodFcn4,
MeasurementLikelihoodFcn5 |
| Type: character vector, string |
Default:
'vdpMeasurementLikelihoodFcn' |
Suppose that measured output data is not available at all time points
at the port y1 that corresponds to the first
measurement likelihood function. To generate an input port
Enable1, select Add Enable
port. Use a signal at this port to enable the correction
of estimated states only when measured data is available. Similarly, if
measured output data is not available at all time points at the port
yi for the
ith measurement
likelihood function, select the corresponding Add Enable
port.
Programmatic Use
Block Parameter:
HasMeasurementEnablePort1,
HasMeasurementEnablePort2,
HasMeasurementEnablePort3,
HasMeasurementEnablePort4,
HasMeasurementEnablePort5 |
| Type: character vector |
Values:
'off',
'on' |
Default:
'off' |
Resampling
Method used for particle resampling, specified as one of the following:
'Multinomial'— Multinomial resampling, also called simplified random sampling, generatesNrandom numbers independently from the uniform distribution in the open interval(0,1)and uses them to select particles proportional to their weight.'Stratified'— Stratified resampling divides the whole population of particles into subsets called strata. It pre-partitions the(0,1)interval intoNdisjoint sub-intervals of size1/N. The random numbers are drawn independently in each of these sub-intervals and the sample indices chosen in the strata.'Systematic'— Systematic resampling is similar to stratified resampling as it also makes use of strata. One distinction is that it only draws one random number from the open interval(0,1/N)and the remaining sample points are calculated deterministically at a fixed1/Nstep size.
Programmatic Use
Block Parameter:
ResamplingMethod |
| Type: character vector |
Values:
'Multinomial',
'Systemic',
'Stratified' |
Default:
'Multinomial' |
Method to determine when resampling occurs, specified as either
'Ratio' or 'Interval'. The
'Ratio' value triggers resampling based on the
ratio of effective total particles. The 'Interval'
value triggers resampling at regular time steps of the particle filter
operation.
Programmatic Use
Block Parameter:
TriggerMethod |
| Type: character vector |
Values:
'Ratio',
'Interval' |
Default:
'Ratio' |
Minimum desired ratio of the effective number of particles to the total number of particles, specified as a positive scalar. The effective number of particles is a measure of how well the current set of particles approximates the posterior distribution. A lower effective particle ratio implies that a lower number of particles are contributing to the estimation and resampling is required.
If the ratio of the effective number of particles to the total number of particles falls below the minimum effective particle ratio, a resampling step is triggered.
Specify minimum effective particle ratio as any value from 0 through 1.
Dependencies
To enable this parameter, set the Trigger
method parameter in the System
model tab to Ratio.
Programmatic Use
Block Parameter:
MinEffectiveParticleRatio |
| Type: scalar |
Values: Range
[0,1] |
Default:
0.5 |
Fixed interval between resampling, specified as a positive scalar
integer. The sampling interval determines during which correction steps
the resampling is executed. For example, a value of two means the
resampling is executed every second correction step. A value of
inf means that resampling is never
executed.
Dependencies
To enable this parameter, set the Trigger
method parameter in the System
model tab to Interval.
Programmatic Use
Block Parameter:
SamplingInterval |
| Type: positive scalar integer |
Default:
1 |
Random Number Generator Options
Whether the random numbers are repeatable, specified as either
'Repeatable' or 'Not
repeatable'. If you want to be able to produce the same
result more than once, set Randomness to
'Repeatable', and specify the same random number
generator seed value in Seed.
Programmatic Use
Block Parameter:
Randomness |
| Type: character vector |
Values:
'Repeatable', 'Not
repeatable' |
Default:
'Repeatable' |
Seed value for repeatable random numbers, specified as a scalar.
Dependencies
To enable this parameter, set the Randomness
parameter in the System model tab to
'Repeatable'.
Programmatic Use
Block Parameter:
Seed |
| Type: scalar |
Default:
0 |
Settings
Use this parameter to specify the data type for all block parameters.
Programmatic Use
Block Parameter: DataType |
| Type: character vector |
Values: 'single', 'double' |
Default: 'double' |
Block sample time, specified as a positive scalar.
Use the Sample time parameter if your state transition and all measurement likelihood functions have the same sample time. Otherwise, select the Enable multirate operation option in the Multirate tab, and specify sample times in the same tab.
Dependencies
To enable this parameter, set the Enable multirate
operation parameter in the Block output,
Multirate tab to off.
Programmatic Use
Block Parameter:
SampleTime |
| Type: character vector, string |
Default:
'1' |
Block Outputs, Multirate Tab
Outputs
Method used for extracting a state estimate from particles, specified as one of the following:
'Mean'— The Particle Filter block outputs the weighted mean of the particles, depending on the parameters Weights and Particles, as the state estimate.'Maxweight'— The Particle Filter block outputs the particle with the highest weight as the state estimate.'None'— Use this option to implement a custom state estimation method by accessing all particles using the Output all particles parameter from the Block outputs, Multirate tab.
Programmatic Use
Block Parameter:
StateEstimationMethod |
| Type: character vector, string |
Values:
'Mean', 'MaxWeight',
'None' |
Default:
'Mean' |
If you select this parameter, an output port for particles used in the estimation, Particles is generated in the block.
If the
StateOrientationparameter is specified as'column', then the particles are output as an Ns-by-Np array. Ns is the number of states of the system, and Np is the number of particles.If the
StateOrientationparameter is specified as'row', then the particles are output as an Np-by-Ns array.
Programmatic Use
Block Parameter:
OutputParticles |
| Type: character vector |
Values:
'off',
'on' |
Default:
'off' |
If you select this parameter, an output port for particle weights used in the estimation, Weights is generated in the block.
If the
StateOrientationparameter is specified as'column', then the particle weights are output as a 1-by-Np vector. Here, where each weight is associated with the particle in the same column in theParticlesarray. Np is the number of particles used for state estimation.If the
StateOrientationparameter is specified as'row', then the particle weights are output as a Np-by-1 vector.
Programmatic Use
Block Parameter:
OutputWeights |
| Type: character vector |
Values:
'off',
'on' |
Default:
'off' |
If you select this parameter, a state estimation error covariance output port, P is generated in the block.
Dependencies
To enable this parameter, set the State estimation
method parameter in the Block outputs,
Multirate tab to 'Mean'.
Programmatic Use
Block Parameter:
OutputStateCovariance |
| Type: character vector |
Values:
'off',
'on' |
Default:
'off' |
When this parameter is selected, the block outputs the corrected state
estimate at time step k, estimated using
measured outputs until time k. If you clear this
parameter, the block returns the predicted state estimate for time k, estimated using
measured output until a previous time k-1. Clear this
parameter if your filter is in a feedback loop and there is an algebraic
loop in your Simulink model.
Programmatic Use
Block Parameter:
UseCurrentEstimator |
| Type: character vector |
Values:
'on',
'off' |
Default:
'on' |
Multirate
Select this parameter if the sample times of the state transition or any of the measurement likelihood functions differ from the rest. You specify the sample times in the Multirate tab, in Sample time.
Programmatic Use
Block Parameter:
EnableMultirate |
| Type: character vector |
Values:
'off',
'on' |
Default:
'off' |
If the sample times for state transition and measurement likelihood functions are different, specify Sample time. Specify the sample times for the measurement functions as positive integer multiples of the state transition sample time. The sample times you specify correspond to the following input ports:
Ports corresponding to state transition function — Additional input to state transition function StateTransitionFcnInputs. The sample times of these ports must always equal the state transition function sample time, but can differ from the sample time of the measurement likelihood functions.
Ports corresponding to ith measurement likelihood function — Measured output y
i, additional input to measurement likelihood function MeasurementLikelihoodFcniInputs, enable signal at port Enablei. The sample times of these ports for the same measurement likelihood function must always be the same, but can differ from the sample time for the state transition function and other measurement likelihood functions.
Dependencies
To enable this parameter, set the Enable multirate
operation parameter in the Block outputs,
Multirate tab to on.
Programmatic Use
Block Parameter:
StateTransitionFcnSampleTime,
MeasurementLikelihoodFcn1SampleTime1,
MeasurementLikelihoodFcn1SampleTime2,
MeasurementLikelihoodFcn1SampleTime3,
MeasurementLikelihoodFcn1SampleTime4,
MeasurementLikelihoodFcn1SampleTime5 |
| Type: character vector, string |
Default:
'1' |
References
[1] T. Li, M. Bolic, P.M. Djuric, "Resampling Methods for Particle Filtering: Classification, implementation, and strategies," IEEE Signal Processing Magazine, vol. 32, no. 3, pp. 70-86, May 2015.
Extended Capabilities
The state transition and measurement likelihood functions that you specify must use only the MATLAB commands and Simulink blocks that support code generation. For a list of blocks that support code generation, see Blocks Supported for Code Generation (Simulink Coder). For a list of commands that support code generation, see Functions and Objects Supported for C/C++ Code Generation (MATLAB Coder).
Version History
Introduced in R2018a
See Also
Blocks
Functions
Topics
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)