detect
Detect objects using YOLO v4 object detector configured for monocular camera
Since R2022a
Syntax
Description
bboxes = detect(detector,I)I using you only look once version 4
(YOLO v4) object detector configured for a monocular camera. The locations of objects
detected are returned as a set of bounding boxes.
When using this function, use of a CUDA®-enabled NVIDIA® GPU is highly recommended. The GPU reduces computation time significantly. Usage of the GPU requires Parallel Computing Toolbox™. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
[___,
returns a categorical array of labels assigned to the bounding boxes in addition to the
output arguments from the previous syntax. The labels used for object classes are defined
during training using the labels] = detect(detector,I)trainYOLOv4ObjectDetector function.
[___] = detect(___,
detects objects within the rectangular search region specified by
roi)roi. Use output arguments from any of the previous syntaxes. Specify
input arguments from any of the previous syntaxes.
detectionResults = detect(detector,ds)read function
of the input datastore.
[___] = detect(___,
also specifies options using one or more Name,Value)Name,Value pair arguments in
addition to the input arguments in any of the preceding syntaxes.
Examples
Load a pretrained yolov4ObjectDetector object.
detector = yolov4ObjectDetector("csp-darknet53-coco");Model a monocular camera sensor by creating a monoCamera object. This object contains the camera intrinsics and the location of the camera on the ego vehicle.
focalLength = [309.4362 344.2161]; % [fx fy] principalPoint = [318.9034 257.5352]; % [cx cy] imageSize = [480 640]; % [mrows ncols] height = 2.1798; % height of camera above ground, in meters pitch = 14; % pitch of camera, in degrees intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize); sensor = monoCamera(intrinsics,height,Pitch=pitch);
Configure the detector for use with the camera. Limit the width of detected objects to 1.5-2.5 meters. The configured detector is a yolov4ObjectDetectorMonoCamera object.
vehicleWidth = [1.5 2.5]; detectorMonoCam = configureDetectorMonoCamera(detector,sensor,vehicleWidth);
Read in an image captured by the camera.
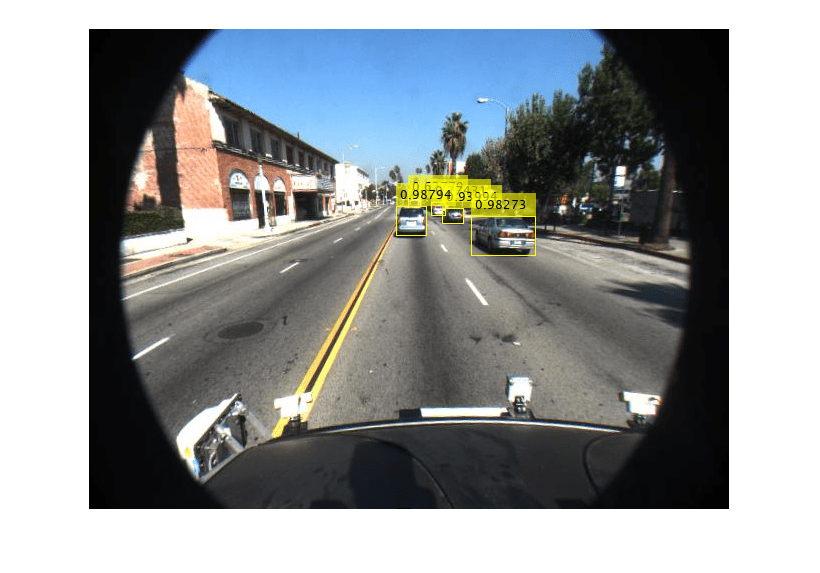
I = imread("carsinfront.png");Detect the cars in the image by using the detector. Annotate the image with the bounding boxes for the detections and the detection confidence scores.
[bboxes,scores,labels] = detect(detectorMonoCam,I); I = insertObjectAnnotation(I,"Rectangle",bboxes,scores,AnnotationColor="yellow"); imshow(I)
Display the labels for detected bounding boxes. The labels specify the class names of the detected objects.
disp(labels)
car
car
car
car
car
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022a
See Also
Apps
Functions
configureDetectorMonoCamera|selectStrongestBboxMulticlass|evaluateDetectionMissRate|evaluateDetectionPrecision