monostaticLidarSensor
Simulate and model lidar point cloud generator
Description
The monostaticLidarSensor
System object™ generates point cloud detections of targets by a monostatic lidar sensor. You
can use the monostaticLidarSensor object in a scenario containing moving and stationary
platforms such as one created using trackingScenario.
The monostaticLidarSensor object generates point clouds from platforms with defined
meshes (using the Mesh property). The monostaticLidarSensor
System object models an ideal point cloud generator and does not account for the effects of
false alarms and missed detections.
To generate point cloud detections using a simulated lidar sensor:
Create the
monostaticLidarSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
sensor = monostaticLidarSensor(SensorIndex)SensorIndex. Default property values are used.
sensor = monostaticLidarSensor(SensorIndex,Name,Value)monostaticLidarSensor(1,'DetectionCoordinates','Sensor') creates a
simulated lidar sensor that reports detections in the sensor Cartesian coordinate system
with sensor index equal to 1.
Properties
Usage
Syntax
Description
pointCloud = sensor(targetMeshes,time)tgtMeshes, at the simulation time.
pointCloud = sensor(targetMeshes,insPose,time)insPose, for the sensor
platform. INS information is used by tracking and fusion algorithms to estimate the target
positions in the scenario frame.
To enable this syntax, set the HasINS property to
true.
[
also returns the configuration of the sensor, pointCloud,config] = sensor(___)config, at the current
simulation time. You can use these output arguments with any of the previous input
syntaxes.
[
also returns pointCloud,config,clusters] = sensor(___)clusters, the true cluster labels for each point in the
point cloud.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a tracking scenario. Add an ego platform and a target platform.
scenario = trackingScenario; ego = platform(scenario); target = platform(scenario,'Trajectory',kinematicTrajectory('Position',[10 -3 0],'Velocity',[5 0 0]));
Define the geometric mesh of the target. The size of the mesh is adjusted after specifying the target dimensions.
target.Mesh = extendedObjectMesh('sphere');
target.Dimensions.Length = 5;
target.Dimensions.Width = 3;
target.Dimensions.Height = 2;Visualize the mesh of the target.
show(target.Mesh)

ans =
Axes with properties:
XLim: [-2.5000 2.5000]
YLim: [-2 2]
XScale: 'linear'
YScale: 'linear'
GridLineStyle: '-'
Position: [0.1300 0.1100 0.7750 0.8150]
Units: 'normalized'
Show all properties
Create a monostaticLidarSensor with specified UpdateRate and DetectionCoordinates.
sensor = monostaticLidarSensor(1,'UpdateRate',10,'DetectionCoordinates','Body');
Obtain the mesh of the target viewed from the ego platform after advancing the scenario one step forward.
advance(scenario); tgtmeshes = targetMeshes(ego);
Use the created sensor to generate point clouds from the obtained target mesh.
time = scenario.SimulationTime; [ptCloud, config, clusters] = sensor(tgtmeshes, time);
Visualize the point cloud detections.
figure()
plot3(ptCloud(:,1),ptCloud(:,2),ptCloud(:,3),'o')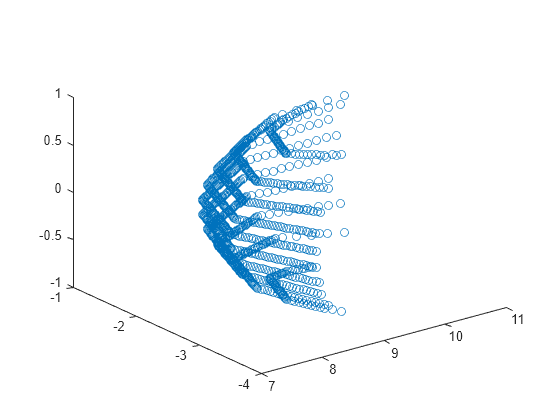
Version History
Introduced in R2020b