deval
Evaluate differential equation solution structure
Description
Examples
This example solves the DDE equation y' = ddex1de(t,y,Z) using dde23, then plots the solution.
Solve the system using dde23.
sol = dde23(@ddex1de, [1 0.2], @ddex1hist, [0 5]);
Evaluate the solution at 100 points in the interval [0 5].
x = linspace(0,5); y = deval(sol,x);
Plot the solution.
plot(x,y)

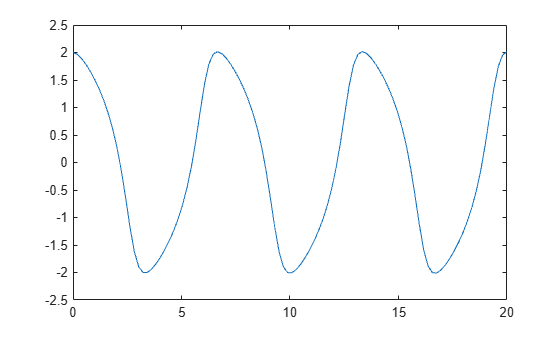
This example solves the system y' = vdp1(t,y) using ode45, then plots the first component of the solution.
Solve the system using ode45.
sol = ode45(@vdp1, [0 20], [2 0]);
Evaluate the first component of the solution at 100 points in the interval [0 20].
x = linspace(0,20,100); y = deval(sol,x,1);
Plot the solution.
plot(x,y)
Solve the simple ODE y' = t^2 with initial condition y0 = 0 in the interval using ode23.
sol = ode23(@(t,y) t^2, [0 3], 0);
Evaluate the solution at seven points. The solution structure sol contains an interpolating function that deval uses to produce a continuous solution at these points. Specify a second output argument with deval to also return the derivative of the interpolating function at the specified points.
x = linspace(0,3,7); [y,yp] = deval(sol,x)
y = 1×7
0 0.0417 0.3333 1.1250 2.6667 5.2083 9.0000
yp = 1×7
0 0.2500 1.0000 2.2500 4.0000 6.2500 9.0000
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced before R2006a