closestPoint
Find closest point on reference path to global point
Syntax
Description
pathPoints = closestPoint(refPath,points)points.
[
optionally returns a logical vector pathPoints,inWindow] = closestPoint(refPath,points)inWindow, specifying whether each
point for the corresponding xy coordinate in points
is projected within the search window..
[_] = closestPoint(
optionally accepts a nondecreasing row vector refPath,points,searchWindow)searchWindow, which
defines the interval of the path to use to find the closest points.
Examples
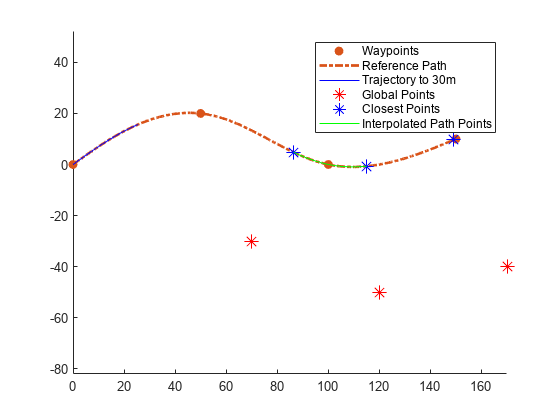
Generate a reference path from a set of waypoints.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Create a trajectoryGeneratorFrenet object from the reference path.
connector = trajectoryGeneratorFrenet(refPath);
Generate a five-second trajectory between the path origin and a point 30 meters down the path as Frenet states.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convert the trajectory to the global states.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Display the reference path and the trajectory.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Specify global points and find the closest points on reference path.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Display the global points and the closest points on reference path.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpolate between the arc lengths of the first two closest points along the reference path.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Display the interpolated path points.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Create a self-intersecting reference path.
refPath = referencePathFrenet([0 100 -pi/4; ... 50 50 -pi/4;... 75 50 pi/2; ... 50 50 -3*pi/4; ... 0 0 -3*pi/4]);
Show the reference path.
figure show(refPath); title("Closest Points Around Intersection") xlim([0 125]) ylim([0 125]) hold on

Find the arclength at which the intersection occurs.
sIntersection = refPath.SegmentParameters(2,end);
Generate the Frenet states lying just before and after the intersection.
f0 = [sIntersection-20 5 0 10 0 0]; % [S dS ddS L Lp Lpp] f1 = [sIntersection+20 5 0 -5 0 0]; % [S dS ddS L Lp Lpp]
Calculate the time to travel with constant longitudinal velocity.
T = (f1(1)-f0(1))/f1(2);
Create trajectory generator using the reference path.
generator = trajectoryGeneratorFrenet(refPath);
Generate a trajectory between the points.
[fTraj,gTraj] = connect(generator,f0,f1,T); pts = gTraj.Trajectory;
Define the plot helper functions.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1);
plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))),mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:});
plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);Plot the trajectory.
plotFcn(pts,[],{"k.-"});
Calculate closest point on path to each global state.
closestPts = closestPoint(refPath,pts);
Plot the closest point vectors.
plotFcn(pts,closestPts,{"b"});
Define a window in which to search for closest points.
buffWindow = [f0(1)-5 f1(1)+5];
plotInterval(buffWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});
Find closest points within window.
closestPtsInWindow = closestPoint(refPath,pts,buffWindow);
Display windowed results.
plotFcn(pts,closestPtsInWindow,{"g","LineWidth",3});
Find closest points using a window that is too small.
smallWindow = [f0(1)+5 f1(1)-5]; [closestPtsSmall,inWindow] = closestPoint(refPath,pts,smallWindow);
Overlay small window results.
plotInterval(smallWindow,100,{"m","LineWidth",3});
plotFcn(pts(inWindow,:),closestPtsSmall(inWindow,:),{"Color",[.5 1 .5]});
plotFcn(pts(~inWindow,:),closestPtsSmall(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","Trajectory","ClosestPoints",...
"BuffWindow","ClosestInsideBuffWindow","SmallWindow",...
"ClosestInsideSmallWindow","ClosestOutsideSmallWindow"});
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2020b