interpolate
Interpolate reference path at provided arc lengths
Description
pathPoints = interpolate(refPath,arclengths)
Examples
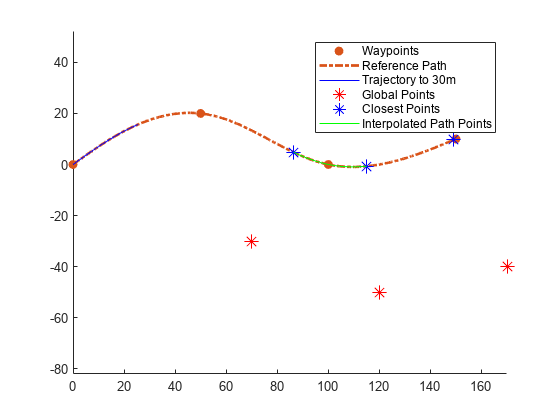
Generate a reference path from a set of waypoints.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Create a trajectoryGeneratorFrenet object from the reference path.
connector = trajectoryGeneratorFrenet(refPath);
Generate a five-second trajectory between the path origin and a point 30 meters down the path as Frenet states.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convert the trajectory to the global states.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Display the reference path and the trajectory.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Specify global points and find the closest points on reference path.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Display the global points and the closest points on reference path.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpolate between the arc lengths of the first two closest points along the reference path.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Display the interpolated path points.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2020b