addInertialFrame
Syntax
Description
addInertialFrame(
adds a new inertial frame to the robot scenario by specifying the base, name, position, and
orientation of the new inertial frame.scenario,base,name,position,orientation)
Examples
Create a robot scenario. By default, the inertial frames are the ENU and the NED frames.
scenario = robotScenario
scenario =
robotScenario with properties:
UpdateRate: 10
StopTime: Inf
HistoryBufferSize: 100
ReferenceLocation: [0 0 0]
MaxNumFrames: 50
CurrentTime: 0
IsRunning: 0
TransformTree: [1×1 transformTree]
InertialFrames: ["ENU" "NED"]
Meshes: {}
CollisionMeshes: {}
Platforms: [0×0 robotPlatform]
Add a new inertial frame named robot to the scenario.
addInertialFrame(scenario,"ENU","robot",eul2tform([pi/4 0 0]))
You can now use the robot frame as a reference frame to define other objects in the scenario.
scenario.InertialFrames
ans = 1×3 string
"ENU" "NED" "robot"
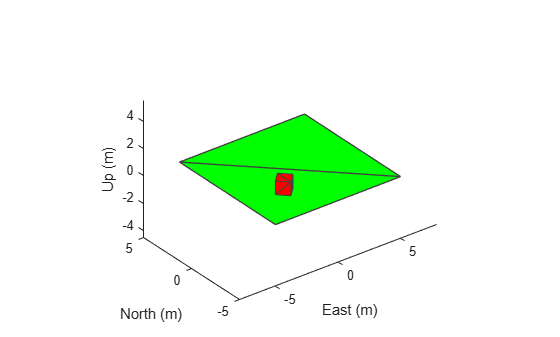
Add plane and box mesh with reference frame in the scenario.
addMesh(scenario,"Plane",Size=[10 10],Color=[0 1 0]) addMesh(scenario,"Box",Position=[-2 -2 0.5],ReferenceFrame="robot")
Visualize the scenario.
show3D(scenario);
Input Arguments
Version History
Introduced in R2022a
See Also
Objects
Functions
addMesh|advance|binaryOccupancyMap|restart|setup|show3D|updateSensors