addMesh
Description
addMesh(
adds a static mesh to the robot scenario by specifying the mesh type and specifies
additional options using name-value arguments.scenario,type,Name=Value)
Examples
Create a robot Scenario.
scenario = robotScenario;
Add a plane, box, cylinder, and sphere mesh to the scenario.
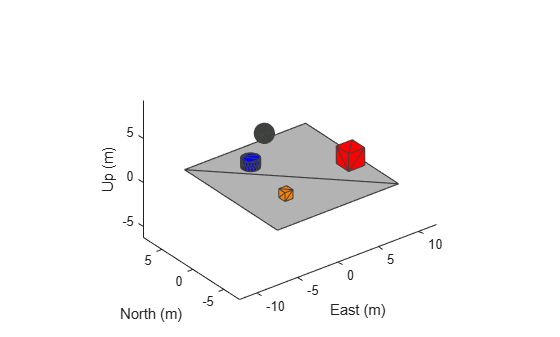
addMesh(scenario,"Plane",Size=[15 15],Color=[0.7 0.7 0.7]) addMesh(scenario,"Box",Position=[-3 -3 0.5],Color=[1 0.5 0]) addMesh(scenario,"Cylinder",Position=[-2 4 0.5],Color=[0 0 1]) addMesh(scenario,"Sphere",Position=[2 7 1],Color=[0 1 0])
Add custom mesh to the scenario with vertices and faces.
vertices = [0 0 0; 0 0 2; 0 2 0; 0 2 2; 2 0 0; 2 0 2; 2 2 0; 2 2 2]; faces = [1 3 7; 1 7 5; 1 6 2; 1 5 6; 1 2 4; 1 4 3; ... 3 4 8; 3 8 7; 5 8 6; 5 7 8; 2 8 4; 2 6 8]; addMesh(scenario,"Custom",Vertices=vertices,Faces=faces,Position=[4 -4 1])
Visualize the scenario.
show3D(scenario);
Input Arguments
Name-Value Arguments
Version History
Introduced in R2022a
See Also
Objects
Functions
addInertialFrame|advance|binaryOccupancyMap|restart|setup|show3D|updateSensors