makeweight
Weighting function with monotonic gain profile
Syntax
Description
makeweight is a convenient way to
specify loop shapes, target gain profiles, or weighting functions
for applications such as controller synthesis and control system tuning.
creates a first-order, continuous-time weight W(s) satisfying these constraints:W = makeweight(dcgain,[freq,mag],hfgain)
In other words, the gain of W passes through
mag at the finite frequency freq.
W = makeweight(dcgain,[freq,mag],hfgain,Ts)
In other words, the gain of W passes through
mag at the frequency freq. The
frequency freq must satisfy 0 < freq <
π/Ts.
W = makeweight(dcgain,wc,hfgain,___)wc. This syntax is
equivalent to setting [freq,mag] to [wc,1].
You can use this syntax with any of the previous input-argument combinations to
create a continuous-time, discrete-time, or Butterworth weighting function.
Examples
Create continuous-time weighting functions by specifying the low-frequency gain, high-frequency gain, and magnitude of the gain at some intermediate frequency.
For instance, create a weighting function with a gain of 40 dB at low frequency, rolling off to –20 dB at high frequency. Specify further that the gain is about 10 dB at 1 rad/s by putting these values in a vector [freq,mag]. Specify all the gains in absolute units.
Wl = makeweight(100,[1,3.16],0.1);
Create a weighting function with a gain of –10 dB at low frequency, rising to 40 dB at high frequency. Specify a 0 dB crossover frequency of 10 rad/s. To specify a 0 dB crossover frequency, you can use the crossover frequency as the second input argument instead of the vector [freq,mag].
Wh = makeweight(0.316,10,100);
Plot the magnitudes of the weighting functions to confirm that they meet the response specifications.
bodemag(Wl,Wh)
legend
grid on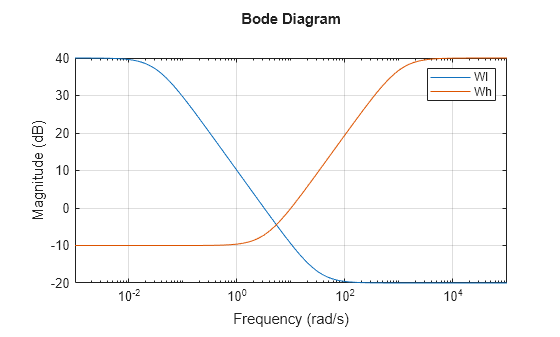
Create a gain profile that rolls off at high frequency without flattening. Specify a gain of 40 dB at low frequency and a crossover frequency of 10 rad/s.
W = makeweight(100,[10 1],0);
Specifying a high-frequency gain of 0 ensures that the frequency response rolls off at high frequencies without leveling off. Plot the gain profile to confirm this shape.
bodemag(W)
grid on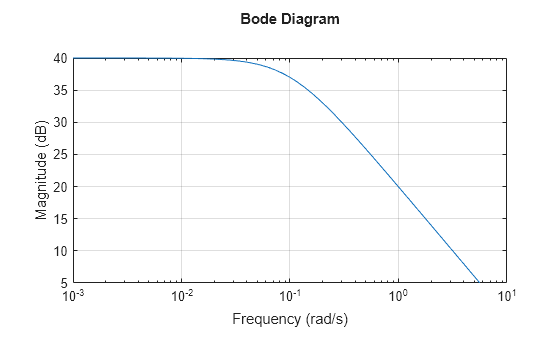
Create discrete-time weighting functions by specifying the low-frequency gain, high-frequency gain, magnitude of the gain at some intermediate frequency, and sample time.
Create a weighting function with a sample time of 0.1 s. Specify a gain of 40 dB at low frequency, rolling off to –20 dB at high frequency. Specify further that the gain is about 10 dB at 0.01 rad/s. Provide all gains in absolute units.
Wl = makeweight(100,[0.01,3.16],0.1,0.1);
Create a weighting function with a gain of –10 dB at low frequency, rising to 40 dB at high frequency. Specify a 0 dB crossover frequency of 2 rad/s and a sample time of 0.1 s. To specify a 0 dB crossover frequency, you can use the crossover frequency as the second input argument instead of the vector [freq,mag].
Wh = makeweight(0.316,2,100,0.1);
Plot the magnitudes of the weighting functions to confirm that they meet the response specifications.
bodemag(Wl,Wh)
grid on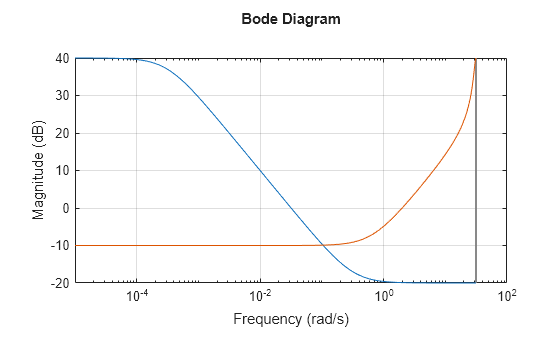
The high-frequency leveling of Wh is distorted due to the proximity of its crossover frequency to the Nyquist frequency.
By default, makeweight creates first-order weighting functions. If you want a sharper transition between the low-frequency and high-frequency gains, you can specify the order with the last input argument. For instance, suppose you want to create a weighting function with a sample time of 0.1 s. The function has a gain of –10 dB at low frequency, rising to 40 dB at high frequency. Additionally, the gain passes through 6 dB at 1 rad/s. For comparison, create both a third-order and a first-order function with these specifications.
W3 = makeweight(0.316,[1 2],100,0.1,3); W1 = makeweight(0.316,[1 2],100,0.1); bodemag(W3,W1) legend('location','northwest') grid on
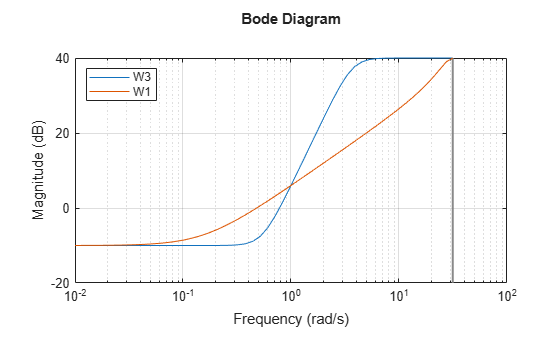
For the first-order function, the high-frequency leveling is distorted due to the proximity of its crossover frequency to the Nyquist frequency. Using a sharper, higher-order transition ensures that the function has leveled out before reaching the Nyquist frequency.
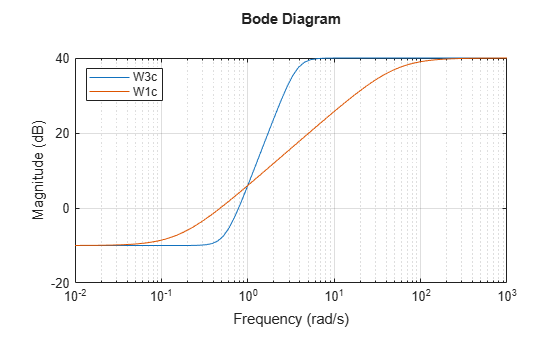
To create continuous-time weighting functions of higher order, set Ts = 0. For instance, create continuous-time weighting functions with the same gain specifications as W1 and W3.
W3c = makeweight(0.316,[1 2],100,0,3); W1c = makeweight(0.316,[1 2],100); bodemag(W3c,W1c) legend('location','northwest') grid on
Input Arguments
Output Arguments
Version History
Introduced before R2006a
See Also
hinfstruct | hinfsyn | mixsyn | musyn | mkfilter | augw | TuningGoal.LoopShape