cfirpm
Complex and nonlinear-phase equiripple FIR filter design
Syntax
Description
b = cfirpm(n,f,fresp)n+1 FIR filter with the best approximation to the
desired response at the frequencies in f as returned by the
fresp function, which is called by its function handle
@fresp. For more information, see User-Defined Frequency Response Functions.
b = cfirpm(n,f,a)a at the band edges in f.
This syntax returns the same result as b = cfirpm(n,f,{@multiband,a}).
For more information, see Predefined Frequency Response Functions.
b = cfirpm(___,'skip_stage2')cfirpm function determines that an optimal solution has not been
reached by the standard firpm error-exchange. Disabling this algorithm
can increase the speed of computation but incur a reduction in accuracy. By default, the
second-stage optimization is enabled.
Examples
Design a 30th-order linear-phase lowpass filter. Display its magnitude and phase responses.
b = cfirpm(30,[-1 -0.5 -0.4 0.7 0.8 1],@lowpass);
freqz(b,1,[],"whole")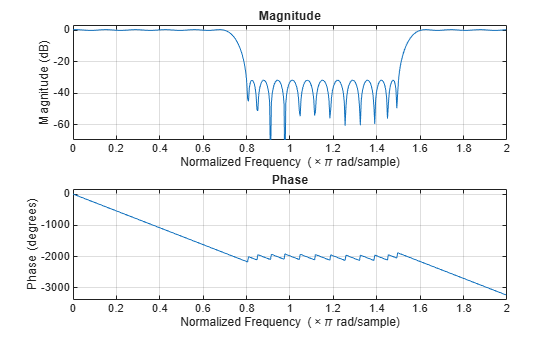
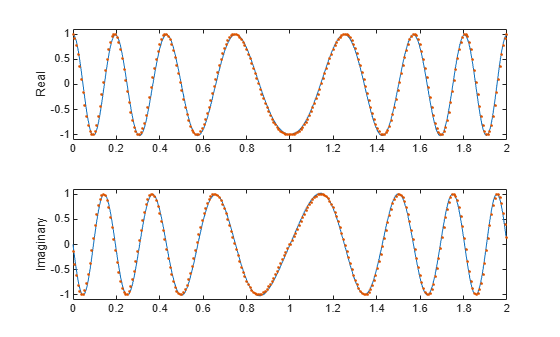
Use cfirpm to design an FIR filter of order N = 22 that approximates a nonlinear-phase allpass system in the normalized frequency interval . Compute the frequency response of the filter.
n = 22; w = [-1 1]; b = cfirpm(n,w,"allpass"); [h,f] = freqz(b,1,[],'whole');
The cfirpm algorithm approximates a filter response given by . Plot the real and imaginary parts of the frequency response and overlay the target response.
gf = linspace(-1,1,256); d = exp(-1j*pi*gf*n/2 + 4j*pi*gf.*abs(gf)); figure subplot(2,1,1) plot(f/pi,real(h), ... gf+1,fftshift(real(d)),'.') ylabel("Real") ylim(1.1*[-1 1]) subplot(2,1,2) plot(f/pi,imag(h), ... gf+1,fftshift(imag(d)),'.') ylabel("Imaginary") ylim(1.1*[-1 1])
Plot the magnitude and phase responses of the FIR filter. Express the magnitude response in dB and the phase response in degrees.
freqz(b,1,[],'whole')
Design a lowpass filter of order 30 using a custom frequency response function fresp. The code for the fresp function is available at the end of the example.
[b,delta]= cfirpm(30,linspace(-1,1,32),@fresp);
Visualize the magnitude response of the filter.
freqz(b,1,"whole")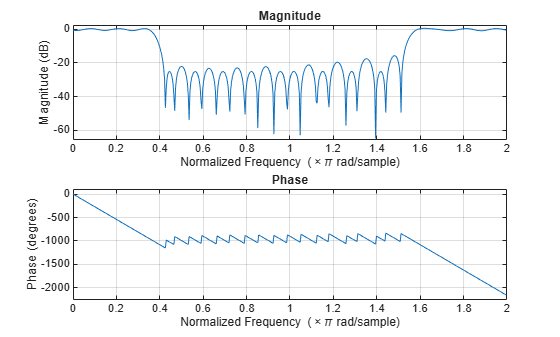
User-Defined fresp Function: Design a lowpass filter
The fresp function lets you choose to design a lowpass filter, a highpass filter, or a differentiator. The filter order N and frequency array F must be specified. If the frequency grid GF and weights W are unspecified, the function determines those values automatically.
function [dh,dw] = fresp(N,F,GF,W) W = [1;1]*(W(:).'); W = W(:); type = 'lowpass'; mags = zeros(size(W)); switch type case 'lowpass' mags(10:end-10) = 1; case 'highpass' mags(1:10) = 1; mags(end-10:end) = 1; case 'differentiator' mags = abs(linspace(-pi,pi,length(mags))); end dh = interp1(F(:),mags,GF).*exp(-1j*pi*GF*N/2); dw = interp1(F(:),W,GF); end
Input Arguments
Output Arguments
More About
Algorithms
The cfirpm function enables you to specify arbitrary
frequency-domain constraints for the design of a possibly complex FIR filter. The Chebyshev (or minimax) filter error is optimized, producing
equiripple FIR filter designs.
An extended version of the Remez exchange method is implemented for the complex case. This
exchange method obtains the optimal filter when the equiripple nature of the filter is
restricted to have n+2 extrema. When the filter does not converge, the
algorithm switches to an ascent-descent algorithm that takes over to finish the convergence to
the optimal solution. For further details, see the references.
References
[1] Demjanjov, V. F., and V. N. Malozemov. Introduction to Minimax. New York: John Wiley & Sons, 1974.
[2] Karam, L.J. Design of Complex Digital FIR Filters in the Chebyshev Sense. Ph.D. Thesis, Georgia Institute of Technology, March 1995.
[3] Karam, L.J., and J. H. McClellan. "Complex Chebyshev Approximation for FIR Filter Design." IEEE® Transactions on Circuits and Systems II: Analog and Digital Signal Processing 42, no. 3 (March 1995): 207–216.
Extended Capabilities
Version History
Introduced before R2006a