Configure Models with Pulse Width Modulation Signals
Many industrial applications use pulse width modulation (PWM) signals because such signals are robust in the presence of noise. When using Simulink® Control Design™ software, subsystems that contain PWM signals do not linearize well due to discontinuities in the signal.
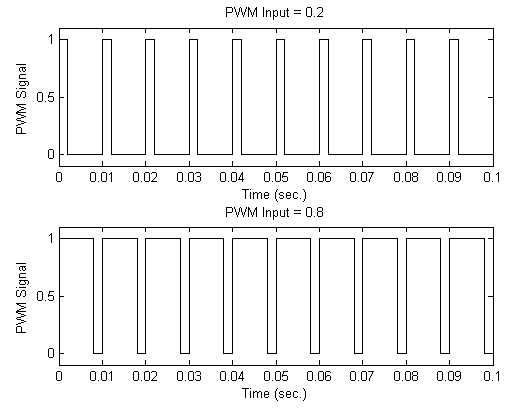
The following figure shows two PWM signals. The top plot shows a PWM signal with a 20% duty cycle, which represents a 0.2 V DC signal. The signal is 1 V for 20% of each cycle and 0 V for the remaining 80% of the cycle. The average signal value is 0.2 V. The bottom plot shows a PWM signal with an 80% duty cycle, which represents a 0.8 V DC signal.
For an example of such a PWM system, open the scdpwm model. In this model,
a constant signal is converted to a PWM signal using the Voltage to PWM
subsystem.
open_system('scdpwm')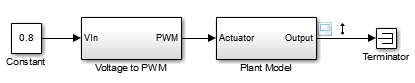
In this model, a constant signal is converted to a PWM signal using the Voltage to PWM subsystem.
open_system('scdpwm/Voltage to PWM')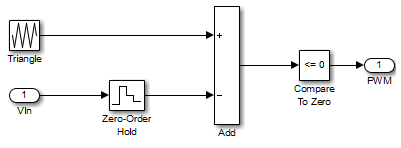
When linearizing a model that contains PWM signals there are two effects that produce poor linearization results:
The signal level at the operating point is one of the discrete values within the PWM signal, not the DC signal value. For example, in the
scdpwmmodel, the signal level is either 0 or 1, not 0.8. This change in operating point affects the linearized model.The creation of the PWM signal within the
Voltage to PWMsubsystem uses the Compare To Zero block. Such comparator blocks do not linearize well due to their discontinuities.
To linearize a model that contains PWM signals, you must replace the linearization of the blocks or subsystems that produce the PWM signals. To do so, use one of the following methods:
Specify the linearization of the PWM blocks using known values. For example, in Specify Custom Linearizations for Simulink Blocks, the linearization of the
Voltage to PWMsubsystem is set to a DC gain of 1.Specify the linearization of the PWM subsystem using System Identification Toolbox™ software. For an example, see Specify Linearization for Model Components Using System Identification.
Specify the linearization of the PWM subsystem using frequency response estimation. For more information on frequency response estimation, see Estimate Frequency Response Using Model Linearizer and Estimate Frequency Response at the Command Line.