Camera Pose Estimation and 3-D Reconstruction
Computer Vision Toolbox™ provides a comprehensive set of foundational tools for estimating
camera poses and reconstructing 3-D scenes from multiple views. These tools are
essential for applications such as structure-from-motion, visual SLAM, augmented
reality, and robotics. You can estimate camera poses using the essential matrix
or fundamental matrix and also compute relative camera positions based on
epipolar geometry. For calibrated cameras, you can use the
perspective-three-point (P3P) algorithm or the camera projection matrix to help
determine absolute or relative poses from 2-D to 3-D point correspondences. For
more information, see estimateEssentialMatrix,
estimateFundamentalMatrix and
estrelpose.
To refine pose estimates and improve reconstruction accuracy, the toolbox
supports bundle adjustment techniques for optimizing camera poses and 3-D point
locations jointly or independently. For more information, see bundleAdjustment.
For 3-D reconstruction, you can triangulate points from multiple views and
manage point-track correspondences. You can also convert between image and world
coordinates, which supports projection and back-projection tasks. For more
information, see pointTrack, triangulate and img2world2d.
The toolbox provides functionality to manage and organize image and point data
using specialized objects. These structures enable pose graph creation and
optimization for large-scale reconstruction pipelines. The toolbox also supports
visualization of camera positions and reconstructed point clouds in 3-D space.
For more information, see imageviewset, createPoseGraph
and plotCamera.
Functions
Topics
- Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion. (Since R2026a)
- Implement Visual SLAM in MATLAB
Understand the visual simultaneous localization and mapping (vSLAM) workflow and how to implement it using MATLAB.
- Coordinate Systems
Specify pixel Indices, spatial coordinates, and 3-D coordinate systems.
- What Is Camera Calibration?
Estimate the parameters of a lens and image sensor of an image or video camera.
Featured Examples

Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).

Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.

Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor.

Visual SLAM with RGB-D Camera
Process RGB-D image data to build a map of an indoor environment and estimate the trajectory of the camera.
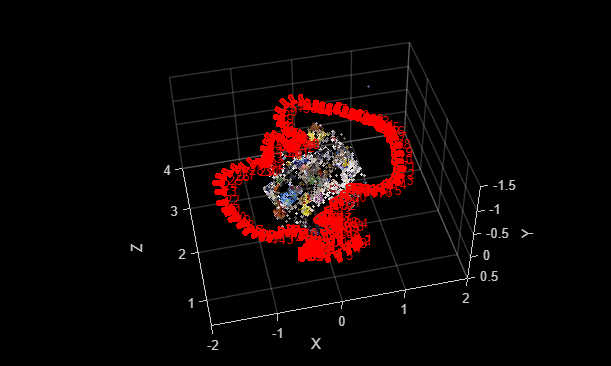
Reconstruct Complete 3-D Scene Using Incremental Structure from Motion
Use incremental structure from motion to generate complete 3-D scene by integrating all camera views with the initialized 3-D reconstruction.
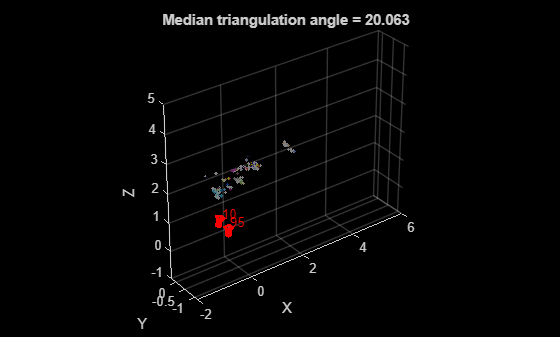
Reconstruct 3-D Scene from Geometrically Refined Pair of Initial Views
Initialize 3-D reconstruction by selecting a robust image pair from the geometrically refined view graph.

Structure from Motion from Two Views
Estimate 3-D structure of a scene from a set of 2-D images.

Monocular Visual Odometry
Determine location and orientation of a camera by analyzing a sequence of images.
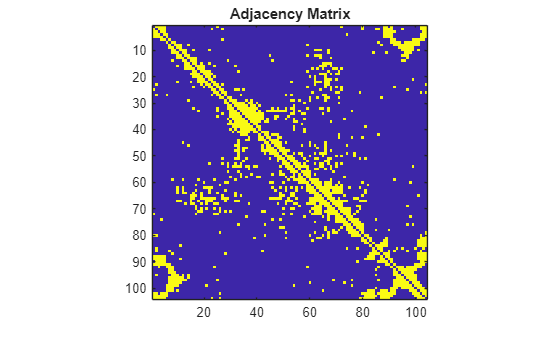
Create View Graph Using Bag of Features
Extract features from images and build a view graph based on visual similarity using bag-of-features approach.
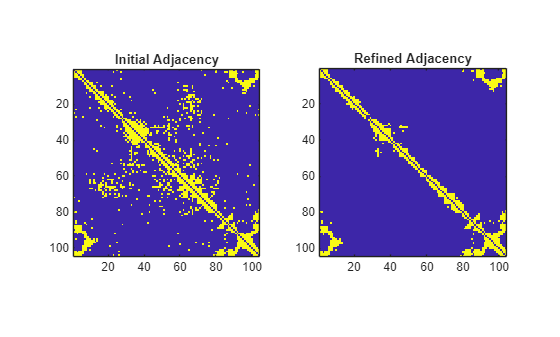
Refine View Graph Using Geometric Verification
Refine the view graph created purely based on visual similarity by verifying geometric consistency between image pairs.