trainSSDObjectDetector
Train SSD deep learning object detector
Syntax
Description
Train a Detector
trainedDetector = trainSSDObjectDetector(trainingData,detector,options)
This function requires that you have Deep Learning Toolbox™. It is recommended that you also have Parallel Computing Toolbox™ to use with a CUDA®-enabled NVIDIA® GPU. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
Resume Training a Detector
trainedDetector = trainSSDObjectDetector(trainingData,checkpoint,options)
Additional Properties
trainedDetector = trainSSDObjectDetector(___,Name=Value)
[
also returns information on the training progress, such as training loss and accuracy, for
each iteration.trainedDetector,info] = trainSSDObjectDetector(___)
Examples
This example shows how to train an SSD object detector on a vehicle data set. The example then uses the trained detector for detecting vehicles in an image.
Load the training data into the workspace.
data = load("vehicleTrainingData.mat");
trainingData = data.vehicleTrainingData;Specify the directory in which training samples are stored. Add full path to the filenames in training data.
dataDir = fullfile(toolboxdir("vision"),"visiondata"); trainingData.imageFilename = fullfile(dataDir,trainingData.imageFilename);
Create an image datastore using the files from the table.
imds = imageDatastore(trainingData.imageFilename);
Create a box label datastore using the label columns from the table.
blds = boxLabelDatastore(trainingData(:,2:end));
Combine the datastores.
ds = combine(imds,blds);
Specify a base network.
baseNetwork = imagePretrainedNetwork("resnet50");Specify the names of the classes to detect.
classNames = "vehicle";Specify the anchor boxes to use for training the network.
anchorBoxes = { ...
[30 60; 60 30; 50 50; 100 100], ...
[40 70; 70 40; 60 60; 120 120]};Specify the names of the feature extraction layers to connect to the detection subnetwork.
layersToConnect = ["activation_22_relu" "activation_40_relu"];
Create an SSD object detector by using the ssdObjectDetector function.
detector = ssdObjectDetector(baseNetwork,classNames,anchorBoxes, ...
DetectionNetworkSource=layersToConnect);Specify the training options.
options = trainingOptions("sgdm", ... InitialLearnRate=0.001, ... MiniBatchSize=16, ... Verbose=true, ... MaxEpochs=30, ... Shuffle="never", ... VerboseFrequency=10);
Train the SSD object detector.
[detector,info] = trainSSDObjectDetector(ds,detector,options);
************************************************************************* Training an SSD Object Detector for the following object classes: * vehicle Training on single GPU. Initializing input data normalization. |=======================================================================================================| | Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Mini-batch | Base Learning | | | | (hh:mm:ss) | Loss | Accuracy | RMSE | Rate | |=======================================================================================================| | 1 | 1 | 00:00:00 | 54.8573 | 43.62% | 2.56 | 0.0010 | | 1 | 10 | 00:00:04 | 3.5709 | 98.90% | 1.65 | 0.0010 | | 2 | 20 | 00:00:07 | 3.2212 | 99.93% | 0.99 | 0.0010 | | 2 | 30 | 00:00:11 | 5.3296 | 98.89% | 1.51 | 0.0010 | | 3 | 40 | 00:00:15 | 4.5304 | 99.76% | 1.15 | 0.0010 | | 3 | 50 | 00:00:18 | 6.2441 | 98.47% | 1.28 | 0.0010 | | 4 | 60 | 00:00:22 | 3.6098 | 98.95% | 1.26 | 0.0010 | | 4 | 70 | 00:00:25 | 5.0838 | 98.81% | 1.23 | 0.0010 | | 5 | 80 | 00:00:29 | 4.9031 | 98.84% | 1.47 | 0.0010 | | 5 | 90 | 00:00:32 | 4.5612 | 99.91% | 0.99 | 0.0010 | | 6 | 100 | 00:00:36 | 3.0531 | 98.90% | 1.13 | 0.0010 | | 7 | 110 | 00:00:40 | 3.4591 | 99.95% | 0.74 | 0.0010 | | 7 | 120 | 00:00:43 | 3.1390 | 99.10% | 1.02 | 0.0010 | | 8 | 130 | 00:00:47 | 3.7369 | 99.77% | 1.14 | 0.0010 | | 8 | 140 | 00:00:50 | 3.3740 | 99.07% | 0.99 | 0.0010 | | 9 | 150 | 00:00:54 | 3.9861 | 98.99% | 1.35 | 0.0010 | | 9 | 160 | 00:00:57 | 3.1168 | 99.24% | 0.90 | 0.0010 | | 10 | 170 | 00:01:01 | 4.1509 | 98.92% | 1.40 | 0.0010 | | 10 | 180 | 00:01:04 | 1.8926 | 99.97% | 0.55 | 0.0010 | | 11 | 190 | 00:01:08 | 1.9993 | 99.13% | 0.88 | 0.0010 | | 12 | 200 | 00:01:11 | 1.0826 | 99.98% | 0.41 | 0.0010 | | 12 | 210 | 00:01:15 | 2.2213 | 99.37% | 0.78 | 0.0010 | | 13 | 220 | 00:01:18 | 2.4177 | 99.84% | 0.99 | 0.0010 | | 13 | 230 | 00:01:22 | 2.7282 | 99.32% | 0.81 | 0.0010 | | 14 | 240 | 00:01:26 | 3.7748 | 99.20% | 1.20 | 0.0010 | | 14 | 250 | 00:01:29 | 2.5727 | 99.33% | 0.77 | 0.0010 | | 15 | 260 | 00:01:33 | 3.8397 | 99.15% | 1.23 | 0.0010 | | 15 | 270 | 00:01:36 | 0.7277 | 99.99% | 0.43 | 0.0010 | | 16 | 280 | 00:01:40 | 2.9342 | 99.22% | 0.78 | 0.0010 | | 17 | 290 | 00:01:43 | 0.8218 | 99.99% | 0.39 | 0.0010 | | 17 | 300 | 00:01:47 | 1.9056 | 99.53% | 0.70 | 0.0010 | | 18 | 310 | 00:01:50 | 1.3405 | 99.93% | 0.71 | 0.0010 | | 18 | 320 | 00:01:54 | 1.5981 | 99.42% | 0.79 | 0.0010 | | 19 | 330 | 00:01:57 | 2.9586 | 99.30% | 1.02 | 0.0010 | | 19 | 340 | 00:02:01 | 1.2590 | 99.43% | 0.66 | 0.0010 | | 20 | 350 | 00:02:05 | 2.8346 | 99.27% | 1.04 | 0.0010 | | 20 | 360 | 00:02:08 | 0.9523 | 99.98% | 0.49 | 0.0010 | | 21 | 370 | 00:02:12 | 1.5545 | 99.26% | 0.74 | 0.0010 | | 22 | 380 | 00:02:16 | 0.7113 | 99.99% | 0.50 | 0.0010 | | 22 | 390 | 00:02:19 | 2.0585 | 99.58% | 0.61 | 0.0010 | | 23 | 400 | 00:02:23 | 1.0087 | 99.93% | 0.55 | 0.0010 | | 23 | 410 | 00:02:26 | 2.1091 | 99.48% | 0.71 | 0.0010 | | 24 | 420 | 00:02:30 | 2.9050 | 99.34% | 0.95 | 0.0010 | | 24 | 430 | 00:02:33 | 2.1874 | 99.44% | 0.64 | 0.0010 | | 25 | 440 | 00:02:37 | 2.9181 | 99.30% | 0.91 | 0.0010 | | 25 | 450 | 00:02:40 | 1.9445 | 99.94% | 0.39 | 0.0010 | | 26 | 460 | 00:02:44 | 3.2013 | 99.20% | 0.71 | 0.0010 | | 27 | 470 | 00:02:48 | 0.3986 | 99.98% | 0.37 | 0.0010 | | 27 | 480 | 00:02:51 | 1.3009 | 99.57% | 0.58 | 0.0010 | | 28 | 490 | 00:02:55 | 1.0920 | 99.96% | 0.60 | 0.0010 | | 28 | 500 | 00:02:58 | 1.7258 | 99.58% | 0.65 | 0.0010 | | 29 | 510 | 00:03:02 | 2.7426 | 99.42% | 0.86 | 0.0010 | | 29 | 520 | 00:03:05 | 1.4956 | 99.63% | 0.59 | 0.0010 | | 30 | 530 | 00:03:09 | 2.0561 | 99.39% | 0.85 | 0.0010 | | 30 | 540 | 00:03:12 | 1.0817 | 99.98% | 0.78 | 0.0010 | |=======================================================================================================| Training finished: Max epochs completed. Detector training complete. *************************************************************************
Verify the training accuracy by inspecting the training loss for each iteration.
figure plot(info.TrainingLoss) grid on xlabel("Number of Iterations") ylabel("Training Loss for Each Iteration")

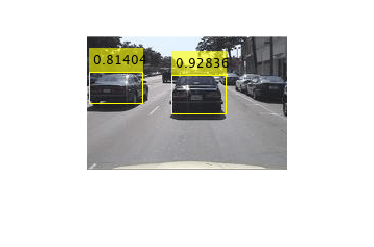
Read a test image.
img = imread("detectcars.png");Detect vehicles in the test image by using the trained SSD object detector.
[bboxes,scores] = detect(detector,img);
Display the detection results.
if(~isempty(bboxes)) img = insertObjectAnnotation(img,"rectangle",bboxes,scores); end figure imshow(img)
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] W. Liu, E. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.Fu, and A.C. Berg. "SSD: Single Shot MultiBox Detector." European Conference on Computer Vision (ECCV), Springer Verlag, 2016
Extended Capabilities
Version History
Introduced in R2020aSee Also
Apps
Functions
trainingOptions(Deep Learning Toolbox) |objectDetectorTrainingData
Objects
Topics
- Object Detection Using SSD Deep Learning
- Estimate Anchor Boxes from Training Data
- Code Generation for Object Detection by Using Single Shot Multibox Detector
- Train Object Detectors in Experiment Manager
- Getting Started with SSD Multibox Detection
- Get Started with Object Detection Using Deep Learning
- Choose an Object Detector
- Anchor Boxes for Object Detection
- Datastores for Deep Learning (Deep Learning Toolbox)