vision.PointTracker
Track points in video using Kanade-Lucas-Tomasi (KLT) algorithm
Description
The point tracker object tracks a set of points using the Kanade-Lucas-Tomasi (KLT), feature-tracking algorithm. You can use the point tracker for video stabilization, camera motion estimation, and object tracking. It works particularly well for tracking objects that do not change shape and for those that exhibit visual texture. The point tracker is often used for short-term tracking as part of a larger tracking framework.
As the point tracker algorithm progresses over time, points can be lost due to lighting variation, out of plane rotation, or articulated motion. To track an object over a long period of time, you may need to reacquire points periodically.
To track a set of points:
Create the
vision.PointTrackerobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
pointTracker = vision.PointTracker returns a point tracker
object that tracks a set of points in a video.
pointTracker = vision.PointTracker(Name,Value)pointTracker =
vision.PointTracker('NumPyramidLevels',3)
Initialize Tracking Process:
To initialize the tracking process, you must use initialize to specify the initial locations of the points and the initial
video frame.
initialize(pointTracker,points,I) initializes points to track and
sets the initial video frame. The initial locations points, must be
an M-by-2 array of [x y] coordinates. The initial video frame,
I, must be a 2-D grayscale or RGB image and must be the same size
and data type as the video frames passed to the object.
The detectFASTFeatures, detectSURFFeatures, detectHarrisFeatures, and detectMinEigenFeatures functions are few of the many ways to obtain the
initial points for tracking.
Properties
Unless otherwise indicated, properties are nontunable, which means you cannot change their
values after calling the object. Objects lock when you call them, and the
release function unlocks them.
If a property is tunable, you can change its value at any time.
For more information on changing property values, see System Design in MATLAB Using System Objects.
Number of pyramid levels, specified as integer. The point tracker implementation of
the KLT algorithm uses image pyramids. The tracker generates an image pyramid, where
each level is reduced in resolution by a factor of two compared to the previous level.
Selecting a pyramid level greater than 1, enables the algorithm to track the points at
multiple levels of resolution, starting at the lowest level. Increasing the number of
pyramid levels allows the algorithm to handle larger displacements of points between
frames. However, computation cost also increases. Recommended values are between
1 and 4.

Each pyramid level is formed by down-sampling the previous level by a factor of two in width and height. The point tracker begins tracking each point in the lowest resolution level, and continues tracking until convergence. The object propagates the result of that level to the next level as the initial guess of the point locations. In this way, the tracking is refined with each level, up to the original image. Using the pyramid levels allows the point tracker to handle large pixel motions, which can comprise distances greater than the neighborhood size.
Forward-backward error threshold, specified as a scalar. If you set the value to
less than inf, the tracker tracks each point from the previous to the
current frame. It then tracks the same points back to the previous frame. The object
calculates the bidirectional error. This value is the distance in pixels from the
original location of the points to the final location after the backward tracking. The
corresponding points are considered invalid when the error is greater than the value set
for this property. Recommended values are between 0 and
3 pixels.
Using the bidirectional error is an effective way to eliminate points that could not
be reliably tracked. However, the bidirectional error requires additional computation.
When you set the MaxBidirectionalError property to
inf, the object does not compute the bidirectional error.
![]()
Size of neighborhood around each point being tracked, specified as a two-element
vector, [height, width]. The
height and width must be odd integers. This
neighborhood defines the area for the spatial gradient matrix computation. The minimum
value for BlockSize is [5 5].
Increasing the size of the neighborhood, increases the computation time.
Maximum number of search iterations for each point, specified as an integer. The KLT
algorithm performs an iterative search for the new location of each point until
convergence. Typically, the algorithm converges within 10 iterations. This property sets
the limit on the number of search iterations. Recommended values are between
10 and 50.
Usage
Syntax
Description
[
tracks the points in the input frame, points,point_validity] = pointTracker(I)I.
[
additionally returns the confidence score for each point.points,point_validity,scores] = pointTracker(I)
setPoints(pointTracker, sets the
points for tracking. The function sets the M-by-2
points)points array of [x
y] coordinates with the points to track. You can use this function if
the points need to be redetected because too many of them have been lost during
tracking.
setPoints(pointTracker,
additionally lets you mark points as either valid or invalid. The input logical vector
points,point_validity)point_validity of length M, contains the true
or false value corresponding to the validity of the point to be tracked. The length
M corresponds to the number of points. A false value indicates an
invalid point that should not be tracked. For example, you can use this function with
the estgeotform2d function to determine the transformation between the point
locations in the previous and current frames. You can mark the outliers as
invalid.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object™ as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create System objects for reading and displaying video and for drawing a bounding box of the object.
videoReader = VideoReader('visionface.avi'); videoPlayer = vision.VideoPlayer('Position',[100,100,680,520]);
Read the first video frame, which contains the object, define the region.
objectFrame = readFrame(videoReader); objectRegion = [264,122,93,93];
As an alternative, you can use the following commands to select the object region using a mouse. The object must occupy the majority of the region:
figure; imshow(objectFrame);
objectRegion=round(getPosition(imrect))
Show initial frame with a red bounding box.
objectImage = insertShape(objectFrame,'rectangle',objectRegion,'ShapeColor','red'); figure; imshow(objectImage); title('Red box shows object region');

Detect interest points in the object region.
points = detectMinEigenFeatures(im2gray(objectFrame),'ROI',objectRegion);
Display the detected points.
pointImage = insertMarker(objectFrame,points.Location,'+','MarkerColor','white'); figure; imshow(pointImage); title('Detected interest points');

Create a tracker object.
tracker = vision.PointTracker('MaxBidirectionalError',1);
Initialize the tracker.
initialize(tracker,points.Location,objectFrame);
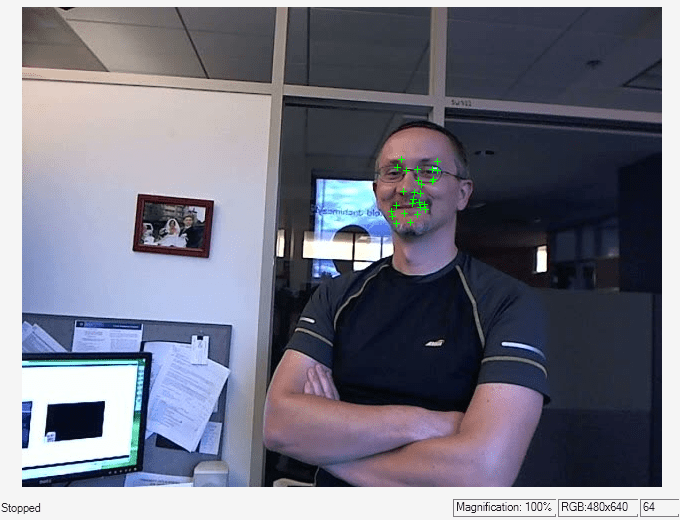
Read, track, display points, and results in each video frame.
while hasFrame(videoReader) frame = readFrame(videoReader); [points,validity] = tracker(frame); out = insertMarker(frame,points(validity, :),'+'); videoPlayer(out); end


Release the video player.
release(videoPlayer);
References
[1] Lucas, Bruce D. and Takeo Kanade. “An Iterative Image Registration Technique with an Application to Stereo Vision,”Proceedings of the 7th International Joint Conference on Artificial Intelligence, April, 1981, pp. 674–679.
[2] Tomasi, Carlo and Takeo Kanade. Detection and Tracking of Point Features, Computer Science Department, Carnegie Mellon University, April, 1991.
[3] Shi, Jianbo and Carlo Tomasi. “Good Features to Track,” IEEE Conference on Computer Vision and Pattern Recognition, 1994, pp. 593–600.
[4] Kalal, Zdenek, Krystian Mikolajczyk, and Jiri Matas. “Forward-Backward Error: Automatic Detection of Tracking Failures,” Proceedings of the 20th International Conference on Pattern Recognition, 2010, pages 2756–2759, 2010.
Extended Capabilities
Version History
Introduced in R2012b
See Also
Functions
insertMarker|detectHarrisFeatures|detectMinEigenFeatures|detectSURFFeatures|estgeotform2d|imrect