CAN Pack
Pack individual signals into CAN message

Libraries:
Vehicle Network Toolbox /
CAN Communication
C2000 Microcontroller Blockset /
Target Communication
Embedded Coder /
Embedded Targets /
Host Communication
Embedded Coder Support Package for Infineon AURIX TC3x Microcontrollers /
Utilities
Embedded Coder Support Package for Infineon AURIX TC4x Microcontrollers /
Utilities
Simulink Real-Time /
CAN /
CAN MSG blocks
Description
The CAN Pack block loads signal data into a CAN message at specified intervals during the simulation.
The CAN Pack block supports:
Simulink® accelerator and rapid accelerator modes. You can speed up the execution of Simulink models. For more information, see Acceleration (Simulink).
Model referencing. Your model can include other Simulink models as modular components. For more information, see Model References (Simulink).
Tip
This block can be used to encode the signals of J1939 parameter groups up to 8 bytes. However, to work with J1939 messages, it is preferable to use the blocks in the J1939 Communication block library instead of this block. See J1939 Communication.
Examples

Periodic CAN Message Transmission Behavior in Simulink
Set up periodic transmission and reception of CAN messages in Simulink® using MathWorks® virtual CAN channels. The virtual channels are connected in a loopback configuration.

Set Up Communication Between Host and Target Models
Set up CAN communication between host-side CAN Vector blocks and target models. This example uses:
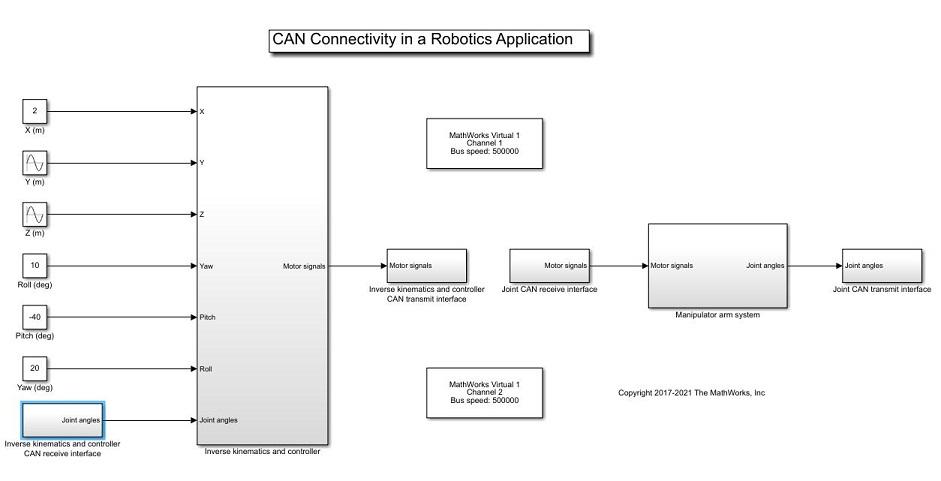
Implement CAN Network for Robotic Arm in Simulink
Use Vehicle Network Toolbox™ and Simulink to implement a Controller Area Network (CAN) in a remote manipulator arm.
Ports
Input
The CAN Pack block has one input port by default. The number of block inputs is dynamic and depends on the number of signals you specify for the block. For example, if your message has four signals, the block can have four input ports.
The block supports the following input signal data types: single, double, int8, int16, int32, int64, uint8, uint16, uint32, uint64, and boolean. The block does not support fixed-point data types.
Tip
Even if you have a zero-length message with no signals, you still must provide dummy data to the input port, for purposes of defining the sample time. In this case, the data value itself is ignored.
The CAN Msg ID input port allows you to dynamically specify the CAN message identifier. This port exists only when the Specify CAN identifier from input port parameter is selected. For more information, see Dynamically Change CAN IDs by CAN Pack Block Input Ports.
Output
This block has one output port, CAN Msg. The CAN Pack block takes the specified input signals and packs them into a CAN message. The output data type is determined by the Output as bus parameter setting.
Parameters
raw data: Input data as a uint8 vector array. If you select this option, you only specify the message fields. All other signal parameter fields are unavailable. This option opens only one input port on your block.The conversion formula is:
whereraw_value = (physical_value - Offset) / Factor
physical_valueis the original value of the signal andraw_valueis the packed signal value.manually specified signals: Allows you to specify data signal definitions. If you select this option, use the Signals table to create your signals. The number of block inputs depends on the number of signals you specify.CANdb specified signals: Allows you to specify a CAN database file that contains message and signal definitions. If you select this option, select a CANdb file. The number of block inputs depends on the number of signals specified in the CANdb file for the selected message.ARXML specified signals: Allows you to specify an ARXML file for signal definitions. This disables some remote options. After reading data from the ARXML file, you can switch tomanually specified signalsto further modify the table.For detailed information, see ARXML File Support for CAN in Simulink.
Programmatic Use
Block Parameter:
DataFormat |
Type:
string | character vector |
Values:
'raw data' | 'manually specified signals' |
'CANdb specified signals' | 'ARXML specified
signals' |
Default:
'raw data' |
This option is available if you specify the Data is input as
parameter as CANdb specified signals or ARXML specified
signals. Click Browse to find the database
file on your system. The message list specified in the database file populates the
Message section of the dialog box. The database file also
populates the Signals table for the selected message.
File names that contain non-alphanumeric characters such as equal signs, ampersands, and so on are not valid database file names. You can use periods in your database name. Before you use the database files, rename them with non-alphanumeric characters.
Programmatic Use
Block Parameter:
CANdbFile
|
Type:
string | character vector
|
This option is available if you specify database in the Data is input as field and you specify a database file in the Database file field. Select the message to display signal details in the Signals table.
Programmatic Use
Block Parameter:
MsgList
|
Type:
string | character vector |
Specify a name for your CAN message. The default is CAN Msg. This
option is available if you choose to input raw data or manually specify signals. This
option is not available if you choose to use signals from a database file.
Programmatic Use
Block Parameter:
MsgName |
Type:
string | character vector |
Specify whether your CAN message identifier is a Standard or an
Extended type. The default is Standard. A
standard identifier is an 11-bit identifier and an extended identifier is a 29-bit
identifier. This option is available if you choose to input raw data or manually specify
signals. For database specified signals, the Identifier type
inherits the type from the database.
Programmatic Use
Block Parameter:
MsgIDType |
Type:
string | character vector |
Values:
'Standard (11-bit identifier)' | 'Extended (29-bit
identifier)' |
Default:
'Standard (11-bit identifier)'
|
Specify your CAN message ID. This number must be a positive integer from 0 through
2047 for a standard identifier and from 0 through 536870911 for an extended identifier.
You can also specify hexadecimal values by using the hex2dec function. This option is available if you choose to input raw data
or manually specify signals.
Programmatic Use
Block Parameter:
MsgIdentifier |
Type:
string | character vector |
Values:
'0' to '536870911' |
When selected, you can dynamically control the CAN identifier (CAN ID) by specifying the value through an input port on the block. Selecting this option adds an input port named CAN Msg ID.
Programmatic Use
Block Parameter:
CANIDInput |
Type:
string | character vector |
Values:
'off' | 'on' |
Default:
'off'
|
Specify the length of your CAN message from 0 to 8 bytes. If you are using database
specified signals for your data input, the database file defines the length of your
message. If not, this field defaults to 8. This option is available
if you choose to input raw data or manually specify signals.
Programmatic Use
Block Parameter:
MsgLength |
Type:
string | character vector |
Values:
'0' to '8' |
Default:
'8'
|
Specify the CAN message as a remote frame.
Programmatic Use
Block Parameter:
Remote |
Type:
string | character vector |
Values:
'off' | 'on' |
Default:
'off'
|
Select this option for the block to output CAN messages as a Simulink bus signal. For more information on Simulink bus objects, see Composite Interfaces (Simulink).
Programmatic Use
Block Parameter:
BusOutput |
Type:
string | character vector |
Values:
'off' | 'on' |
Default:
'off'
|
Add a new signal to the signal table.
Programmatic Use
None
Remove the selected signal from the signal table.
Programmatic Use
None
This table appears if you choose to specify signals manually or define signals by using a database file.
If you are using a database file, the data in the file populates this table and you cannot edit the fields. To edit signal information, switch to manually specified signals.
If you have selected to specify signals manually, create your signals in this table. Each signal that you create has these values:
- Name
Specify a descriptive name for your signal. The Simulink block in your model displays this name. The default is
Signal [row number].- Start bit
Specify the start bit of the data. The start bit is the least significant bit counted from the start of the message data. The start bit must be an integer from 0 through 63.
- Length (bits)
Specify the number of bits the signal occupies in the message. The length must be an integer from 1 through 64.
- Byte order
Select either of these options:
LE: Where the byte order is in little-endian format (Intel®). In this format you count bits from the least significant bit, to the most significant bit. For example, if you pack one byte of data in little-endian format, with the start bit at 20, the data bit table resembles this figure.Little-Endian Byte Order Counted from the Least-Significant Bit to the Highest Address
BE: Where byte order is in big-endian format (Motorola®). In this format you count bits from the least-significant bit to the most-significant bit. For example, if you pack one byte of data in big-endian format, with the start bit at 20, the data bit table resembles this figure.Big-Endian Byte Order Counted from the Least Significant Bit to the Lowest Address
For more information, see CAN Frame Structure, Byte Order, and Bit Counting.
- Data type
Specify how the signal interprets the data in the allocated bits. Choose from:
signed(default)unsignedsingledouble
- Multiplex type
Specify how the block packs the signals into the CAN message at each time step:
Standard: The signal is packed at each time step.Multiplexor: TheMultiplexorsignal, or the mode signal is packed. You can specify only oneMultiplexorsignal per message.Multiplexed: The signal is packed if the value of theMultiplexorsignal (mode signal) at run time matches the configured Multiplex value of this signal.
For example, a message has these signals with the following types and values.
Signal Name Multiplex Type Multiplex Value Signal-A Standard Not applicable Signal-B Multiplexed 1 Signal-C Multiplexed 0 Signal-D Multiplexor Not applicable In this example:
The block packs Signal-A (Standard signal) and Signal-D (Multiplexor signal) in every time step.
If the value of Signal-D is 1 at a particular time step, then the block packs Signal-B along with Signal-A and Signal-D in that time step.
If the value of Signal-D is 0 at a particular time step, then the block packs Signal-C along with Signal-A and Signal-D in that time step.
If the value of Signal-D is not 1 or 0, the block does not pack either of the Multiplexed signals in that time step.
- Multiplex value
This option is available only if you have selected the Multiplex type to be
Multiplexed. The value you provide must match theMultiplexorsignal value at run time for the block to pack theMultiplexedsignal. The Multiplex value must be a positive integer or zero.- Factor
Specify the Factor value to apply to convert the physical value (signal value) to the raw value packed in the message. For more information, see the Data input as parameter conversion formula.
- Offset
Specify the Offset value to apply to convert the physical value (signal value) to the raw value packed in the message. For more information, see the Data input as parameter conversion formula.
- Min, Max
Define a range of signal values. The default settings are
-Inf(negative infinity) andInf, respectively. For database specified signals, these settings are read from the database. For manually specified signals, you can specify the minimum and maximum physical value of the signal. By default, these settings do not clip signal values that exceed the settings.
Programmatic Use
Block Parameter:
SignalInfo |
Type:
string | character vector |
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2009aTo support ARXML file definitions, the following parameters are updated:
Data input as — Has a new option
ARXML specified signals.
CANdb file — Has been renamed to Database file in the block mask. Its programmatic name remains
CANdbFile.
The parameter Specify CAN identifier from input port adds an input port CAN Msg ID, to support dynamic specifying of CAN identifier.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)