DC Blocker
Block DC component
Libraries:
DSP System Toolbox /
Signal Operations
Communications Toolbox /
Comm Filters
Communications Toolbox /
RF Impairments Correction
DSP System Toolbox HDL Support /
Signal Operations
Description
The DC Blocker block removes the DC component of the input signal.
This block supports C/C++ code generation and SIMD code generation. For details, see Code Generation.
Examples

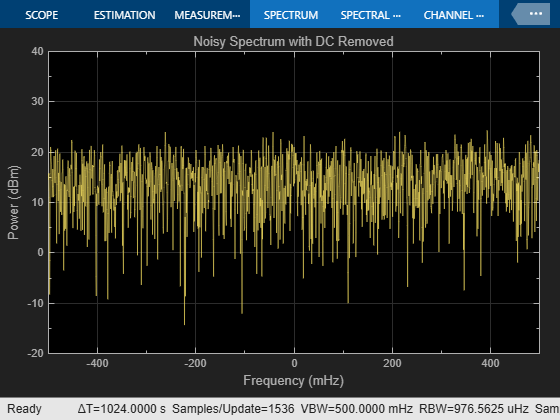
Use DC Blocker to Remove DC Component of Signal
Remove DC component of signal using IIR and Subtract mean estimation algorithms.
DC Blocker with Fixed Point Data
Use DC Blocker block to remove DC offset from fixed-point data.
Ports
Input
Output
Parameters
Specify the algorithm used for estimating the DC offset. Select from the following:
IIRuses a recursive estimate based on a narrow, lowpass elliptic filter. This algorithm typically uses less memory than FIR and is more efficient.FIRuses a nonrecursive, moving-average estimate. This algorithm typically uses more memory than IIR and is less efficient.CICuses a lowpass filter that does not employ any multipliers. If the algorithm isCIC, then fixed-point data must be input to the DC Blocker.Subtract meancomputes the means of the columns of the input matrix and subtracts the means from the input. This method does not retain state between inputs. For example, if the input is[1 2 3 4; 3 4 5 6], then the DC Blocker block inSubtract meanmode outputs[-1 -1 -1 -1; 1 1 1 1].
Specify the normalized filter bandwidth as a real scalar greater than 0 and less than 1.
Dependencies
The DC Blocker uses this parameter only when the
estimation algorithm is set to IIR or
CIC.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Specify the filter order of the lowpass IIR elliptic filter as an integer greater than 3.
Dependencies
The DC Blocker uses this parameter only when the
estimation algorithm is set to IIR.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Specify, as a positive integer, the number of samples to use when the
estimation algorithm is set to FIR.
Dependencies
The DC Blocker uses this parameter only when the
estimation algorithm is set to FIR.
Data Types: single | double
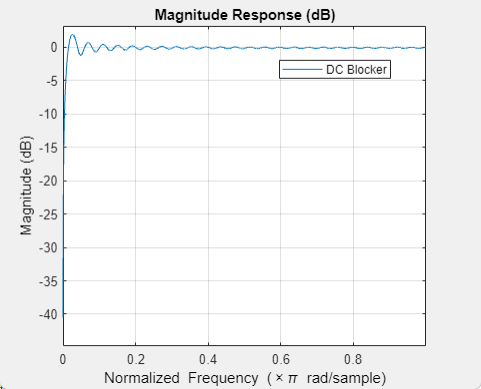
Opens the fvtool and displays the magnitude response
of the DC Blocker. The response is based on the block
parameters. Changes made to these parameters update
fvtool.
To update the magnitude response while fvtool is
running, modify the block parameters and click
Apply.
Specify the type of simulation to run. You can set this parameter to:
Interpreted execution— Simulate model using the MATLAB® interpreter. This option shortens startup time.Code generation— Simulate model using generated C code. The first time you run a simulation, Simulink® generates C code for the block. The C code is reused for subsequent simulations as long as the model does not change. This option requires additional startup time but provides faster subsequent simulations.
Block Characteristics
Algorithms
References
[1] Nezami, M.K. “Performance Assessment of Baseband Algorithms for Direct Conversion Tactical Software Defined Receivers: I/Q Imbalance Correction, Image Rejection, DC Removal, and Channelization.” In MILCOM 2002. Proceedings, 369–76. Anaheim, CA, USA: IEEE, 2002.