bode
Bode frequency response of dynamic system
Syntax
Description
[ computes the frequency response of dynamic
system model
mag,phase,wout]
= bode(sys)sys and returns the magnitude and phase of the response at
each frequency in the vector wout. The function
automatically determines frequencies in wout based on
system dynamics.
bode(___) plots the frequency response of
sys with default plotting options for all of the
previous input argument combinations. The plot displays the magnitude (in dB)
and phase (in degrees) of the system response as a function of frequency. For
more plot customization options, use bodeplot.
To plot responses for multiple dynamic systems on the same plot, you can specify
sysas a comma-separated list of models. For example,bode(sys1,sys2,sys3)plots the responses for three models on the same plot.To specify a color, line style, and marker for each system in the plot, specify a
LineSpecvalue for each system. For example,bode(sys1,LineSpec1,sys2,LineSpec2)plots two models and specifies their plot style. For more information on specifying aLineSpecvalue, seebodeplot.
Examples
Create a Bode plot of the following continuous-time SISO dynamic system.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); bode(H)
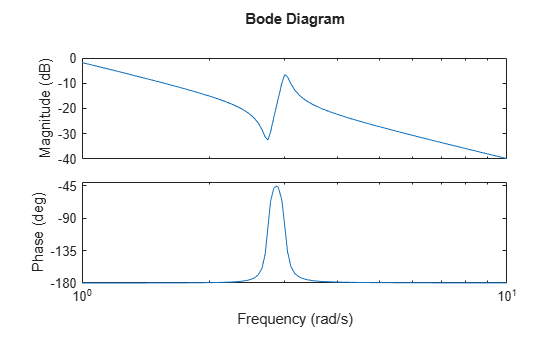
bode automatically selects the plot range based on the system dynamics.
Create a Bode plot over a specified frequency range. Use this approach when you want to focus on the dynamics in a particular range of frequencies.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
bode(H,{1,100})
grid on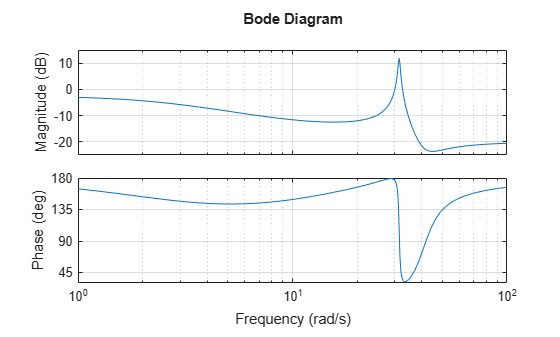
The cell array {1,100} specifies the minimum and maximum frequency values in the Bode plot. When you provide frequency bounds in this way, the function selects intermediate points for frequency response data.
Alternatively, specify a vector of frequency points to use for evaluating and plotting the frequency response.
w = [1 5 10 15 20 23 31 40 44 50 85 100]; bode(H,w,'.-') grid on
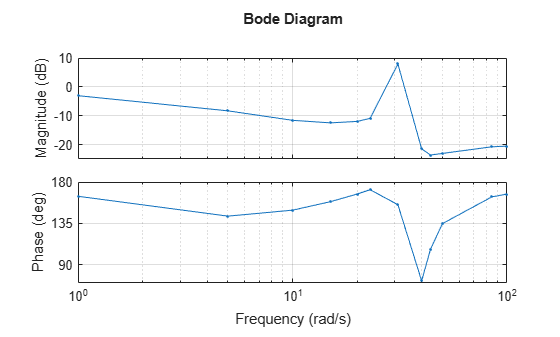
bode plots the frequency response at the specified frequencies only.
Compare the frequency response of a continuous-time system to an equivalent discretized system on the same Bode plot.
Create continuous-time and discrete-time dynamic systems.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');Create a Bode plot that displays both systems.
bode(H,Hd)
The Bode plot of a discrete-time system includes a vertical line marking the Nyquist frequency of the system.
Specify the line style, color, or marker for each system in a Bode plot using the LineSpec input argument.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); bode(H,'r',Hd,'b--')
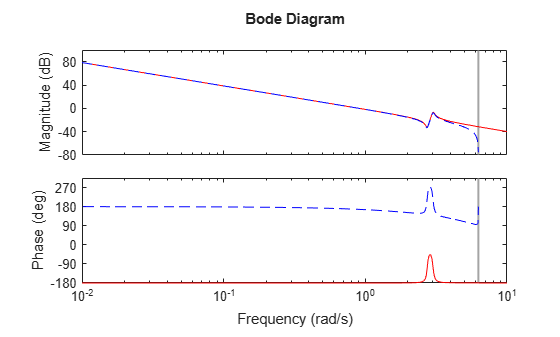
The first LineSpec, 'r', specifies a solid red line for the response of H. The second LineSpec, 'b--', specifies a dashed blue line for the response of Hd.
Compute the magnitude and phase of the frequency response of a SISO system.
If you do not specify frequencies, bode chooses frequencies based on the system dynamics and returns them in the third output argument.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); [mag,phase,wout] = bode(H);
Because H is a SISO model, the first two dimensions of mag and phase are both 1. The third dimension is the number of frequencies in wout.
size(mag)
ans = 1×3
1 1 41
length(wout)
ans = 41
Thus, each entry along the third dimension of mag gives the magnitude of the response at the corresponding frequency in wout.
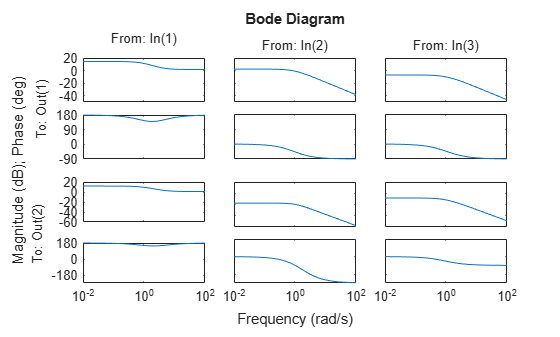
For this example, create a 2-output, 3-input system.
rng(0,'twister'); % For reproducibility H = rss(4,2,3);
For this system, bode plots the frequency responses of each I/O channel in a separate plot in a single figure.
bode(H)
Compute the magnitude and phase of these responses at 20 frequencies between 1 and 10 radians.
w = logspace(0,1,20); [mag,phase] = bode(H,w);
mag and phase are three-dimensional arrays, in which the first two dimensions correspond to the output and input dimensions of H, and the third dimension is the number of frequencies. For instance, examine the dimensions of mag.
size(mag)
ans = 1×3
2 3 20
Thus, for example, mag(1,3,10) is the magnitude of the response from the third input to the first output, computed at the 10th frequency in w. Similarly, phase(1,3,10) contains the phase of the same response.
Compare the frequency response of a parametric model, identified from input/output data, to a nonparametric model identified using the same data.
Identify parametric and nonparametric models based on data.
load iddata2 z2; w = linspace(0,10*pi,128); sys_np = spa(z2,[],w); sys_p = tfest(z2,2);
Using the spa and tfest commands requires System Identification Toolbox™ software.
sys_np is a nonparametric identified model. sys_p is a parametric identified model.
Create a Bode plot that includes both systems.
bode(sys_np,sys_p,w); legend('sys-np','sys-p')

You can display the confidence region on the Bode plot by right-clicking the plot and selecting Characteristics > Confidence Region.
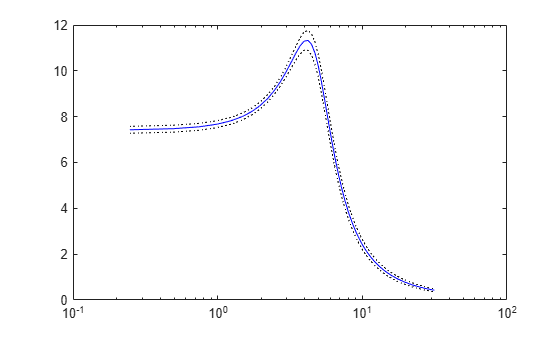
Compute the standard deviation of the magnitude and phase of an identified model. Use this data to create a 3σ plot of the response uncertainty.
Identify a transfer function model based on data. Obtain the standard deviation data for the magnitude and phase of the frequency response.
load iddata2 z2; sys_p = tfest(z2,2); w = linspace(0,10*pi,128); [mag,ph,w,sdmag,sdphase] = bode(sys_p,w);
Using the tfest command requires System Identification Toolbox™ software.
sys_p is an identified transfer function model. sdmag and sdphase contain the standard deviation data for the magnitude and phase of the frequency response, respectively.
Use the standard deviation data to create a 3σ plot corresponding to the confidence region.
mag = squeeze(mag); sdmag = squeeze(sdmag); semilogx(w,mag,'b',w,mag+3*sdmag,'k:',w,mag-3*sdmag,'k:');
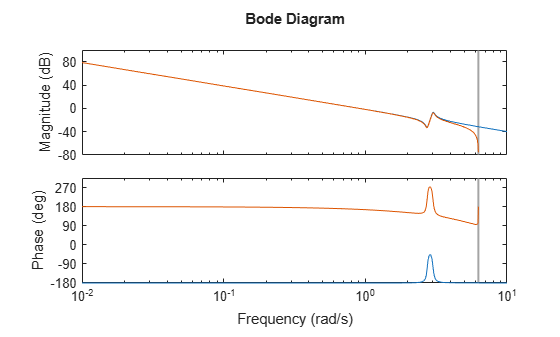
Create a Bode plot of a model with complex coefficients and a model with real coefficients on the same plot.
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(5); bodeplot(Gc,Gr) legend("Complex-coefficient model","Real-coefficient model",Location="southwest");
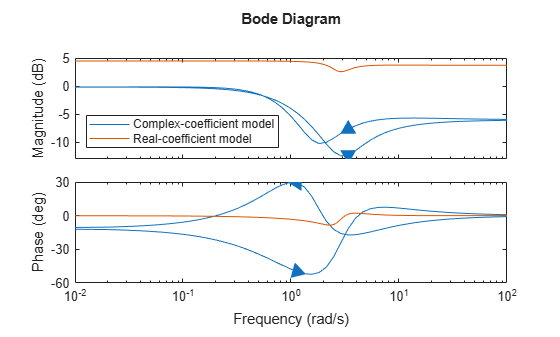
In log frequency scale, the plot shows two branches for complex-coefficient models, one for positive frequencies, with a right-pointing arrow, and one for negative frequencies, with a left-pointing arrow. In both branches, the arrows indicate the direction of increasing frequencies. The plots for real-coefficient models always contain a single branch with no arrows.
You can change the frequency scale of the Bode plot by right-clicking the plot and selecting Properties. In the Property Editor dialog box, on the Units tab, set the frequency scale to linear scale. Alternatively, you can use the bodeplot function and modify the returned chart object.
bp = bodeplot(Gc,Gr); bp.FrequencyScale = "linear"; legend("Complex-coefficient model","Real-coefficient model",Location="southwest");
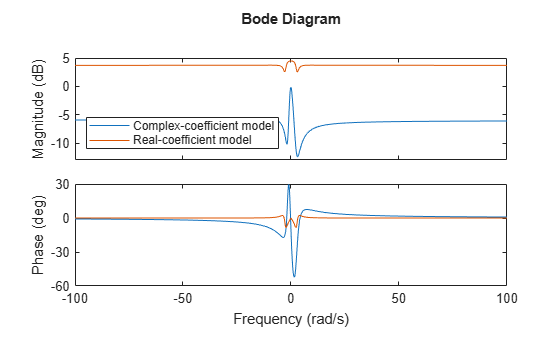
In linear frequency scale, the plot shows a single branch with a symmetric frequency range centered at a frequency value of zero. The plot also shows the negative-frequency response of a real-coefficient model when you plot the response along with a complex-coefficient model.
Input Arguments
Output Arguments
Tips
When you need additional plot customization options, use
bodeplotinstead.Plots created using
bodedo not support multiline titles or labels specified as string arrays or cell arrays of character vectors. To specify multiline titles and labels, use a single string with anewlinecharacter.bode(sys) title("first line" + newline + "second line");
Algorithms
The software computes the frequency response as follows:
Compute the zero-pole-gain (
zpk(Control System Toolbox)) representation of the dynamic system.Evaluate the gain and phase of the frequency response based on the zero, pole, and gain data for each input/output channel of the system.
For continuous-time systems, the
bodefunction evaluates the frequency response on the imaginary axis s = jω and considers only positive frequencies.For discrete-time systems, the
bodefunction evaluates the frequency response on the unit circle. To facilitate interpretation, the command parameterizes the upper half of the unit circle as:where Ts is the sample time and ωN is the Nyquist frequency. The software then uses the equivalent continuous-time frequency ω as the x-axis variable. Because is periodic with period 2ωN, the
bodefunction plots the response only up to the Nyquist frequency ωN. Ifsysis a discrete-time model with an unspecified sample time, thebodefunction uses Ts = 1.