Trigonometric Function
Specified trigonometric function on input
Libraries:
Simulink /
Math Operations
HDL Coder /
Math Operations
HDL Coder /
HDL Floating Point Operations
Description
The Trigonometric Function block performs common trigonometric functions and outputs the result in rad or rev.
Supported Functions
You can select one of these functions from the Function parameter list.
| Function | Description | Mathematical Expression | MATLAB® Equivalent |
|---|---|---|---|
sin
| Sine of the input |
|
sin
|
cos
| Cosine of the input |
|
cos
|
tan
| Tangent of the input |
|
tan
|
asin
| Inverse sine of the input |
|
asin
|
acos
| Inverse cosine of the input |
|
acos
|
atan
| Inverse tangent of the input |
|
atan
|
atan2
| Four-quadrant inverse tangent of the input |
|
atan2
|
sinh
| Hyperbolic sine of the input |
|
sinh
|
cosh
| Hyperbolic cosine of the input |
|
cosh
|
tanh
| Hyperbolic tangent of the input |
|
tanh
|
asinh
| Inverse hyperbolic sine of the input |
|
asinh
|
acosh
| Inverse hyperbolic cosine of the input |
|
acosh
|
atanh
| Inverse hyperbolic tangent of the input |
|
atanh
|
sincos
| Sine of the input; cosine of the input | — | — |
cos + jsin
| Complex exponential of the input | — | — |
CORDIC Approximation Method
CORDIC is an acronym for COordinate Rotation DIgital Computer. The Givens rotation-based CORDIC algorithm is one of the most hardware-efficient algorithms available because it requires only iterative shift-add operations. For more information, see More About. The block input has further requirements.
For more information on when you set Function to
sin, cos, sincos, or
cos + jsin and set the Approximation
method to CORDIC, see Port_1.
This table summarizes what happens for an invalid input.
| Block Usage | Effect of Invalid Input |
|---|---|
| Simulation modes | An error appears. |
| Generated code | Undefined behavior occurs. Avoid relying on undefined behavior for generated code. |
Lookup Approximation Method
For more information on when you set Function to
sin, cos, sincos,
or cos + jsin and set the Approximation method
to Lookup, see Port_1.
Examples
This example shows how to use the Trigonometric Function block to compute the sine of a floating-point input. The output of the Trigonometric Function block has the same data type as the input because the input data type is floating-point and the Approximation method is none.

This example shows how to use the Trigonometric Function block to compute the CORDIC approximation of sincos for a fixed-point input signal.
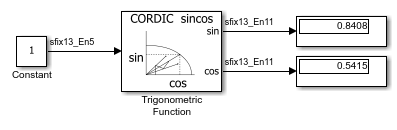
The Trigonometric Function block parameters are:
Function:
sincosApproximation method:
CORDICNumber of iterations:
11
When using the CORDIC approximation method, the input to the Trigonometric Function block must be in the range [-2pi,2pi). The output type of the Trigonometric Function block is fixdt(1,13,11) because the input is a fixed-point signal and the Approximation method is set to CORDIC. The output fraction length equals the input word length minus two.
This example compares the complex exponential output for two different configurations of the Trigonometric Function block.
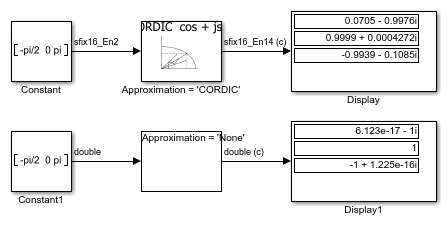
When the Approximation method is CORDIC, the input data type can be fixed point, in this case: fixdt(1,16,2). The output data type is fixdt(1,16,14) because the output fraction length equals the input word length minus two.
When the Approximation method is None, the input data type must be floating point. The output data type is the same as the input data type.
Limitations
You can use fixed-point input signals only when Approximation method is set to
CORDICorLookup. The CORDIC and Lookup approximations are available for thesin,cos,sincos,cos + jsin, andatan2functions.Complex input signals are supported for all functions in this block except
atan2.When you set Approximation method to
Lookup, the number of data points are limited by:smallEnoughNumDataPoints = 2(inputFractionLen-2)+1bigEnoughFractionLen = log2(numberOfDataPoints - 1)+2
where:
smallEnoughNumDataPoints is the maximum number of data points represented by specified input fraction length, inputFractionLen.
bigEnoughFractionLen is the minimum fraction length needed to represent specified number of data points, numberOfDataPoints.
When you set Function to
sin,cos,sincos, orcos + jsinand set the Approximation method toCORDIC, the block has these limitations:When you use signed fixed-point types, the input angle must fall within the range [–2π, 2π) rad.
When you use unsigned fixed-point types, the input angle must fall within the range [0, 2π) rad.
When you set Function to
atan2and the Approximation method toCORDIC, the block has these limitations:Inputs must be the same size, or at least one value must be a scalar value.
Both inputs must have the same data type.
When you use signed fixed-point types, the word length must be
126or less.When you use unsigned fixed-point types, the word length must be
125or less.
When you set Function to
sin,cos,sincos, orcos + jsinand set the Approximation method toLookup, the block has these limitations.When you use signed fixed-point types, the input angle must fall within the range [-2π,2π] rad.
When you use unsigned fixed-point types, the input angle must fall within the range [0,2π) rad.
When you set Function to
atan2and the Approximation method toLookup, the block has these limitations:Inputs must be the same size, or at least one value must be a scalar value.
Both inputs must have the same data type.
Ports
Input
Output
Parameters
Block Characteristics
More About
References
[1] Volder, Jack E., “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8 (1959); 330–334.
[2] Andraka, Ray “A Survey of CORDIC Algorithm for FPGA Based Computers.” Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays. Feb. 22–24 (1998): 191–200.
[3] Walther, J.S., “A Unified Algorithm for Elementary Functions,” Proceedings of the Spring Joint Computer Conference, May 18-20, 1971: 379–386.
[4] Schelin, Charles W., “Calculator Function Approximation,” The American Mathematical Monthly 90, no. 5 (1983): 317–325.
Extended Capabilities
HDL Coder™ provides additional configuration options that affect HDL implementation and synthesized logic.
To generate HDL code from the blocks that use fixed-point data, set Architecture
to Cordic or LUT. This table
shows the functions the block supports for these
setting:
| Block Parameters | HDL Block Properties | Supported Functions |
|---|---|---|
Set Approximation method to
| Set Architecture to
|
|
Set Approximation method to
| Set Architecture to
|
|
To generate HDL code for all functions of the block that use floating-point data, set the
Approximation method block parameter to
none, and the Output signal
type parameter to auto or
real or complex.
Additionally, set the Architecture parameter in the HDL
Block Properties to Trigonometric.
This block has multi-cycle implementations that introduce additional latency in the generated code. To see the added latency, view the generated model or validation model. See Generated Model and Validation Model (HDL Coder).
The latency calculation depends on the word length and LatencyStrategy settings. To view the latency calculation for fixed-point data types, see:
| General | |
|---|---|
| ConstrainedOutputPipeline | Number of registers to place at
the outputs by moving existing delays within your design. Distributed
pipelining does not redistribute these registers. The default is
|
| InputPipeline | Number of input pipeline stages
to insert in the generated code. Distributed pipelining and constrained
output pipelining can move these registers. The default is
|
| OutputPipeline | Number of output pipeline stages
to insert in the generated code. Distributed pipelining and constrained
output pipelining can move these registers. The default is
|
| LatencyStrategy | To enable this property for fixed-point types, set
Function as |
| CustomLatency | To enable this property for fixed-point types, set
Function as |
| IterationsPerPipeline | To enable this property for fixed-point types, set
Function as When you set
LatencyStrategy to
|
| SynthesisAttributes |
Specifies the synthesis attributes for the blocks and block output signals in the model. The generated HDL code contains these attributes. For more information, see SynthesisAttributes (HDL Coder). |
| Native Floating Point | |
|---|---|
| InputRangeReduction | Use this property for the |
| HandleDenormals | Specify whether you want HDL Coder to insert additional logic to handle denormal numbers in your design.
Denormal numbers are numbers that have magnitudes less than the smallest floating-point
number that can be represented without leading zeros in the mantissa. The default is
|
| LatencyStrategy | Specify whether to map the blocks in your design to
|
| MultiplyStrategy | Use this property for the |
The Trigonometric Function blocks have nonzero units in the last place (ULP) error for floating point operations. For more information, see ULP Considerations of Native Floating-Point Operators (HDL Coder).
For the
sinandcosfunctions, the block supports only signed fixed-point data types for CORDIC approximations.For functions that have the CORDIC mode, such as
sin,cos,sincos,atan2, andcos+jsin, HDL code generation does not support fixed-point data types greater than127bits.HDL code generation does not support the double data types for trigonometric functions, except for
sinandcosfunctions.HDL code generation does not support the lookup approximation method when:
The Interpolation method parameter is set to
Linear point-slopeand the Angle Unit parameter is set toradianorrevolution.The Interpolation method parameter is
Flatand the Angle Unit parameter isradian.
HDL Coder displays an error when a Trigonometric Function block is inside a feedback loop and you set:
Architecture to
CordicUsePipelinedKernel to
On
The error occurs because the block is in a feedback loop and the code generator is unable to insert additional latency. To avoid this error, add a delay of length equal to the Number of iterations plus 3 adjacent to the block. The code generator then absorbs this delay to meet the additional latency of the Trigonometric Function block.
For example, this Trigonometric Function block has Number of iterations set to
30. Adding a Delay block with a length33adjacent to the block meets the additional latency.
Version History
Introduced before R2006aSee Also
Blocks
Functions
cordicsin(Fixed-Point Designer) |cordiccos(Fixed-Point Designer) |cordicsincos(Fixed-Point Designer)