Ultra-Local Model
Estimate nonlinear plant as single or double integrator systems with an affine term that captures unknown dynamics and disturbances
Since R2025a

Libraries:
Simulink Control Design /
Disturbance Observer
Description
Ultra-local model (ULM) is an estimation technique that allows you to approximate a nonlinear plant as a single or double integrator system with an affine term that captures unknown dynamics and disturbances. The estimated model is valid only for a local operating point over a short period of time. You can the Ultra-Local Model block for ULM-based estimation. Using this block, you can estimate first-order and second-order local plant dynamics of the following form:
First order —
Second-order —
Here, α is the input gain for tuning and F is the affine term for combined uncertain dynamics and external disturbances.
You can use this block either as a standalone estimator for disturbance estimation and output prediction or use its disturbance estimation capabilities for improving nominal controller performance.
For more information about ULM-based estimation, see Ultra-Local Model for Disturbance Estimation and Compensation.
Examples
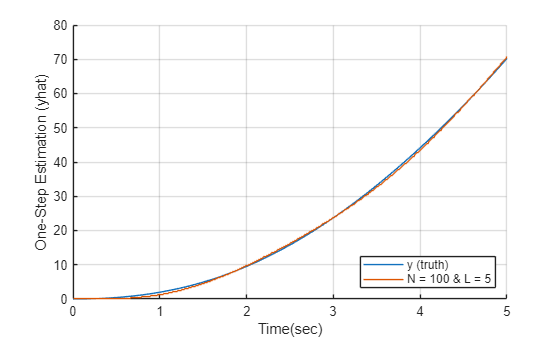
Ultra-Local Model for System Identification and Output Prediction
Use the Ultra-Local Model block for system identification and output prediction.
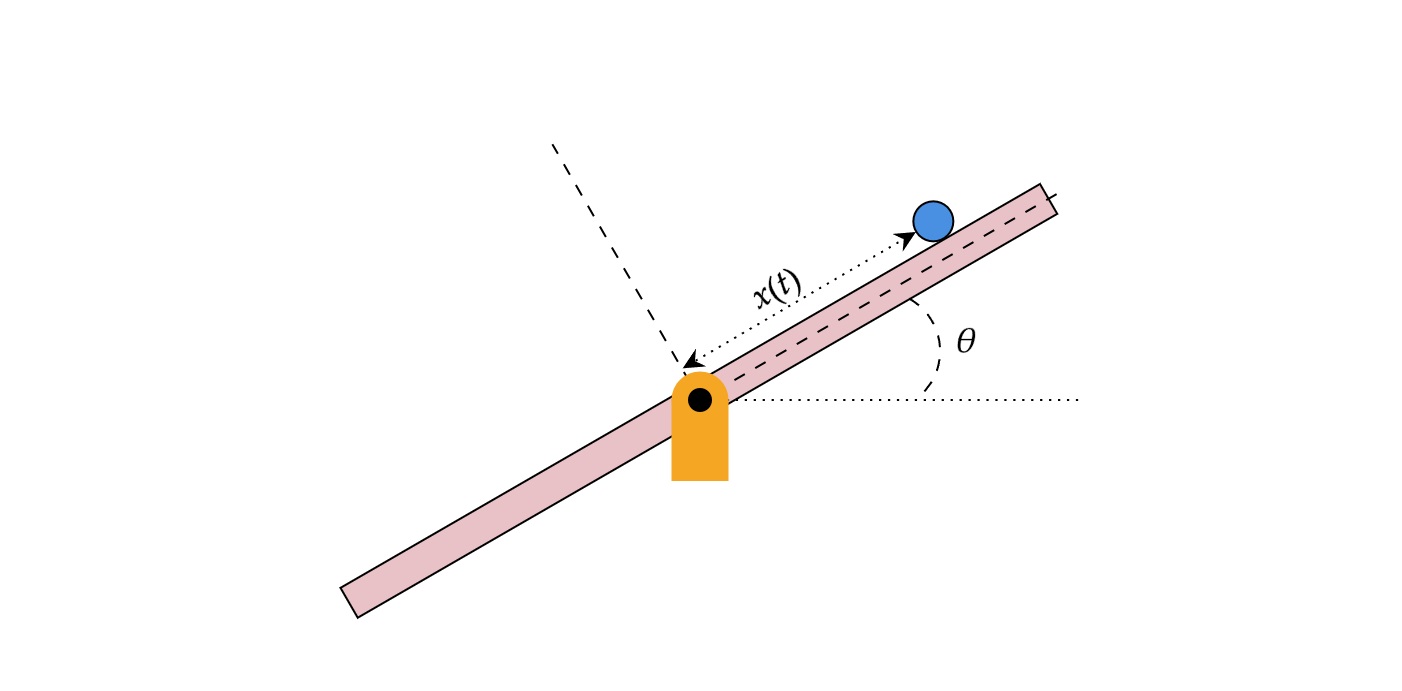
Intelligent PID Using Ultra Local Model for Ball on Beam Balance
Implement model-free intelligent PID control technique using ultra-local model.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2025a