dsp.FrequencyDomainAdaptiveFilter
Compute output, error, and coefficients using frequency-domain FIR adaptive filter
Description
The dsp.FrequencyDomainAdaptiveFilter
System object™ implements an adaptive finite impulse response (FIR) filter in the frequency
domain using the fast block least mean squares (LMS) algorithm. The Length and
the BlockLength properties specify the filter length and the
block length values the algorithm uses. The FFTCoefficients property contains the discrete Fourier
transform of the current filter coefficients. The object offers the constrained and
unconstrained versions of the algorithm with partitioned and non-partitioned modes. For
details, see Algorithms.
To filter a signal using frequency-domain FIR adaptive filter:
Create the
dsp.FrequencyDomainAdaptiveFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
fdaf = dsp.FrequencyDomainAdaptiveFilterfdaf. This System object is used to compute the filtered output and the filter error for a given
input and desired signal.
fdaf = dsp.FrequencyDomainAdaptiveFilter(len)Length
property set to len.
fdaf = dsp.FrequencyDomainAdaptiveFilter(___,PropertyName,Value)
Example: fdaf =
dsp.FrequencyDomainAdaptiveFilter('Length',32,'StepSize',0.1) models a
frequency-domain adaptive filter with a length of 32 taps and a step size of
0.1.
Properties
Usage
Syntax
Description
[
filters the input signal, y,err] = fdaf(x,d)x, using d as the
desired signal, and returns the filtered output in y and the filter
error in err. The System object estimates the filter weights needed to minimize the error between the output
signal and the desired signal. The FFT of these filter weights can be obtained by
accessing the FFTCoefficients property after calling the object
algorithm.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Transmit a quadrature phase shift keying (QPSK) signal across a noisy transmission channel. Minimize the noise in the received signal using a frequency-domain adaptive filter.
The QPSK signal, s, is transmitted across a noisy channel. The numerator and the denominator coefficients of the channel are contained in the vectors b and a, respectively. The received signal, r, obtained at the end of the transmission channel contains the transmitted QPSK signal and the noise added to the channel, n. The adaptive filter is used to extract the QPSK signal from the received noisy input. The desired signal, d, is the delayed version of the QPSK signal.
D = 16; b = exp(1i*pi/4)*[-0.7 1]; a = [1 -0.7]; ntr = 1024; s = sign(randn(1,ntr+D)) + 1i*sign(randn(1,ntr+D)); n = 0.1*(randn(1,ntr+D) + 1i*randn(1,ntr+D)); r = filter(b,a,s) + n; x = r(1+D:ntr+D); d = s(1:ntr);
Create a dsp.FrequencyDomainAdaptiveFilter object to model a frequency-domain adaptive filter of length 32 taps and a step size of 0.1. The adaptive filter accepts the delayed version of the received signal and the desired signal as inputs. The output of the adaptive filter is compared to the desired signal. The error between the two signals represents the noise added to the transmission channel. The adaptive filter updates its coefficients until this error becomes minimal. To get the discrete Fourier transform of the filter coefficients, call the fdaf object, and access the FFTCoefficients property of this object.
mu = 0.1; fdaf = dsp.FrequencyDomainAdaptiveFilter('Length',32,'StepSize',mu); [y,e] = fdaf(x,d); fftCoeffs = fdaf.FFTCoefficients
fftCoeffs = 1×64 complex
0.6802 - 0.6847i -0.2485 - 0.9427i -0.9675 - 0.2123i -0.5605 + 0.8002i 0.5748 + 0.7593i 0.8541 - 0.3917i -0.2526 - 0.9022i -0.9298 + 0.1255i 0.0181 + 0.9366i 0.9207 + 0.0511i 0.1063 - 0.8972i -0.8919 - 0.1829i -0.2668 + 0.9113i 0.9215 + 0.3186i 0.3417 - 0.8859i -0.8285 - 0.3760i -0.4317 + 0.8200i 0.8741 + 0.4765i 0.4874 - 0.9075i -0.8517 - 0.4774i -0.4709 + 0.7632i 0.7468 + 0.4833i 0.5193 - 0.7995i -0.8218 - 0.5649i -0.5908 + 0.7768i 0.7316 + 0.5866i 0.5806 - 0.7270i -0.7148 - 0.5998i -0.6287 + 0.6702i 0.6575 + 0.6379i 0.6332 - 0.7153i -0.7659 - 0.6424i -0.6678 + 0.7294i 0.6536 + 0.6891i 0.7006 - 0.6333i -0.6594 - 0.7117i -0.7207 + 0.6517i 0.6031 + 0.7239i 0.7362 - 0.5776i -0.5869 - 0.7682i -0.7975 + 0.5789i 0.5449 + 0.7992i 0.7909 - 0.5343i -0.5512 - 0.8070i -0.8392 + 0.5338i 0.4605 + 0.8493i 0.8358 - 0.3921i -0.3751 - 0.8388i -0.8739 + 0.3785i 0.3625 + 0.9048i
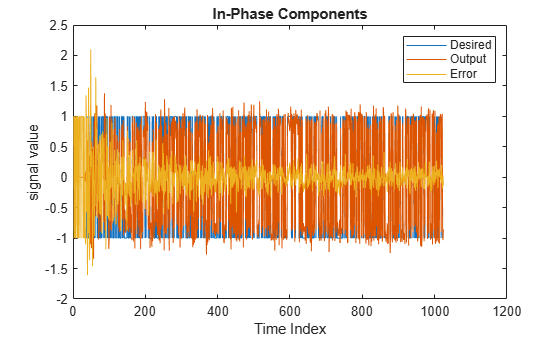
Plot the In-Phase and the Quadrature components of the desired, output, and the error signals.
plot(1:ntr,real([d;y;e])) legend('Desired','Output','Error') title('In-Phase Components') xlabel('Time Index'); ylabel('signal value')
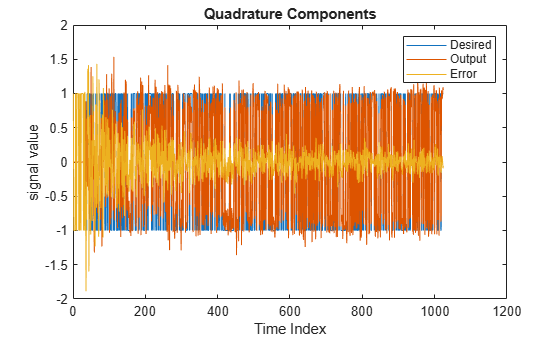
plot(1:ntr,imag([d;y;e])) legend('Desired','Output','Error') title('Quadrature Components') xlabel('Time Index') ylabel('signal value')
Create scatter plots of the received signal and the desired signal.
plot(x(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Received Signal Scatter Plot') axis('square') xlabel('Real[x]') ylabel('Imag[x]') grid on
![Figure contains an axes object. The axes object with title Received Signal Scatter Plot, xlabel Real[x], ylabel Imag[x] contains a line object which displays its values using only markers.](../../examples/dsp/win64/QPSKAdaptiveEqualizationWithFIRFilterExample_03.png)
plot(d(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Desired Signal Scatter Plot') axis('square') xlabel('Real[y]') ylabel('Imag[y]') grid on
![Figure contains an axes object. The axes object with title Desired Signal Scatter Plot, xlabel Real[y], ylabel Imag[y] contains a line object which displays its values using only markers.](../../examples/dsp/win64/QPSKAdaptiveEqualizationWithFIRFilterExample_04.png)
The adaptive filter equalizes the received signal to eliminate noise. Plot the scatter plot of the equalized signal.
plot(y(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Equalized Signal Scatter Plot') axis('square') xlabel('Real[y]') ylabel('Imag[y]') grid on
![Figure contains an axes object. The axes object with title Equalized Signal Scatter Plot, xlabel Real[y], ylabel Imag[y] contains a line object which displays its values using only markers.](../../examples/dsp/win64/QPSKAdaptiveEqualizationWithFIRFilterExample_05.png)
Use a frequency-domain adaptive filter to estimate the coefficients of a long FIR filter. The FIR filter models the impulse response of a room. Use the partitioned mode in the frequency-domain adaptive filter to reduce filter latency.
Note: This example runs only in R2018a or later.
Initialization
Generate a long FIR impulse response of 8192 samples and assign the impulse response to a dsp.FIRFilter object, room. This object models the impulse response of a room. Create a dsp.FrequencyDomainAdaptiveFilter filter, lmsfilt, in partitioned constrained mode. Set the length of the filter to one-fourth the length of the impulse response of the room. Set the block length of the filter to 128 samples. Set the step size to 0.025, initial power to 0.01, averaging factor to 0.98, offset to 1, and the leakage factor to 1. Initialize a dsp.ArrayPlot object to view the filter coefficients. Initialize a timescope object to show the mean-squared error between the filter output and the desired signal.
fs = 16e3; m = 8192; [b,a] = cheby2(4,20,[0.1 0.7]); impulseResponseGenerator = dsp.IIRFilter(... 'Numerator', [zeros(1,6) b], ... 'Denominator', a); roomImpulseResponse = impulseResponseGenerator( ... (log(0.99*rand(1,m)+0.01).*sign(randn(1,m)).*exp(-0.002*(1:m)))'); roomImpulseResponse = roomImpulseResponse/norm(roomImpulseResponse); room = dsp.FIRFilter('Numerator',roomImpulseResponse'); lmsfilt = dsp.FrequencyDomainAdaptiveFilter(... 'Method','Partitioned constrained FDAF',... 'Length',m/4, ... 'BlockLength',128,... 'StepSize',0.025, ... 'InitialPower',0.01, ... 'AveragingFactor',0.98,... 'Offset',1,... 'LeakageFactor',1); FrameSize = lmsfilt.BlockLength; NIter = 2000; AP = dsp.ArrayPlot('YLimits',[-0.2 .2],'ShowLegend',true, ... 'Position',[0 0 560 420],'ChannelNames', ... {'Actual Coefficients','Estimated Coefficients'}); TS = timescope('SampleRate',fs,'TimeSpanSource','property',... 'TimeSpan',FrameSize*NIter/fs,... 'TimeUnits','Seconds',... 'YLimits',[-50 0],'Title','Learning curve',... 'YLabel','dB', ... 'BufferLength',FrameSize*NIter,... 'ShowGrid',true); signalmean = dsp.MovingAverage('SpecifyWindowLength',false);
Streaming
Generate a random input signal using the randn function. The frame size of the input matches the block length of the adaptive filter. The desired signal is the sum of the output of the FIR filter (room) and a white Gaussian noise signal. Pass the input signal and the desired signal to the adaptive filter. Compute the adaptive filter output and the error between the output and the desired signal.
Estimate the time-domain coefficients of the adaptive filter by taking the IFFT of the frequency-domain coefficients vector returned by the lmsfilt.FFTCoefficients property. Compare the estimated coefficients with the actual coefficients assigned to the FIR filter (room). Once the adaptive filter has converged its output to the desired signal, and minimized the error signal, the estimated coefficients match closely with the actual coefficients. This means that the adaptive filter has successfully adapted itself to model the impulse response of the FIR filter (room).
for k = 1:NIter x = randn(FrameSize,1); d = room(x) + 0.01*randn(FrameSize,1); [y,e] = lmsfilt(x,d); FFTCoeffs = lmsfilt.FFTCoefficients; w = ifft(FFTCoeffs,[],2,'symmetric'); w = w(:,1:FrameSize) + w(:,FrameSize+1:end); w = reshape(w.',1,m/4); AP([roomImpulseResponse(1:m/4),w.']); TS(10*log10(signalmean(abs(e).^2))); end
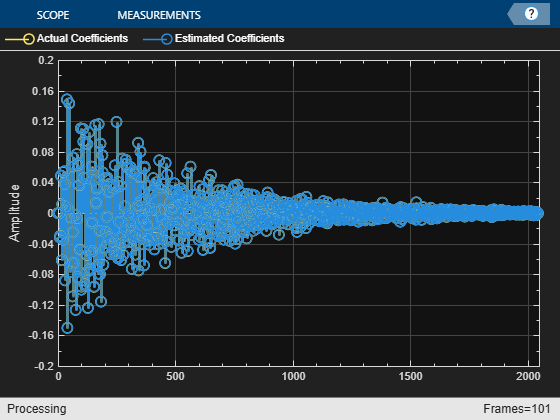
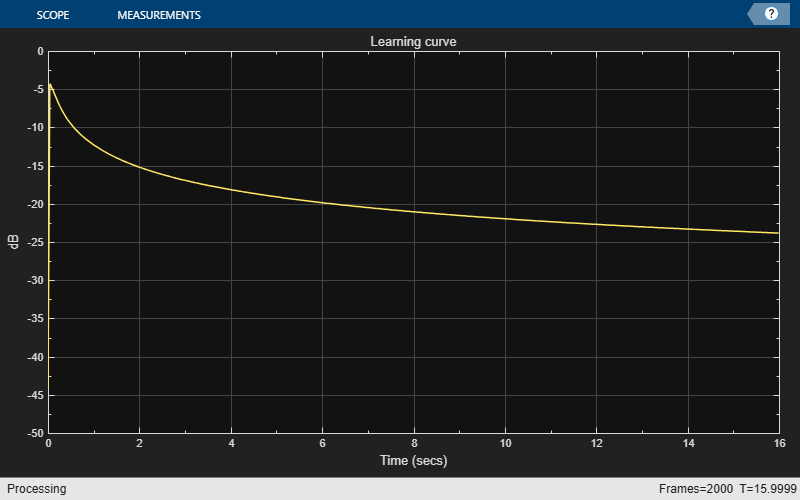
As the filter adapts with time, you can see in the time scope that the mean-squared error becomes minimal. Simultaneously, the estimated coefficients match the actual coefficients closely in the array plot.
Algorithms
Frequency-domain adaptive filtering consists of three steps - filtering, error estimation, and
tap-weight adaptation. This algorithm implements FIR filtering in the frequency domain using
the overlap-save or overlap-add method. For more implementation details of these two
methods, see the Algorithms section in the dsp.FrequencyDomainFIRFilter
object page. The error estimation and the tap-weight adaptation are implemented using the
fast block LMS algorithm (FBLMS).
The frequency-domain adaptive filter processes input data and the desired signal data as a block of samples using the fast block LMS (FBLMS) algorithm. Here is the block diagram of the frequency-domain adaptive filter using the FBLMS algorithm. The frequency-domain FIR filter in this diagram uses the overlap-save method.

where:
N — Filter length
L — Block length
μ — Step size parameter
x(n) — Input signal
X(k) — Transformed input signal in the frequency domain
d(n) — Desired signal
e(n) — Error between the desired signal and the filter output
E(n) — Transformed error signal in the frequency domain
W(k) — Tap-weights vector in the frequency domain
For more details on how the error is estimated and the tap-weights are adapted, see [2].
References
[1] Shynk, J.J. "Frequency-Domain and Multirate Adaptive Filtering." IEEE Signal Processing Magazine. Vol. 9, Number 1, 1992, pp. 14–37.
[2] Farhang-Boroujeny, B., Adaptive Filters: Theory and Applications, Chichester, England, Wiley, 1998.
[3] Stockham, T. G., Jr. "High Speed Convolution and Correlation." Proceedings of the 1966 Spring Joint Computer Conference, AFIPS, Vol. 28, 1966, pp. 229–233.
Extended Capabilities
Version History
Introduced in R2013b
See Also
Objects
dsp.LMSFilter|dsp.RLSFilter|dsp.AffineProjectionFilter|dsp.AdaptiveLatticeFilter|dsp.FilteredXLMSFilter|dsp.FIRFilter|dsp.FastTransversalFilter|dsp.FrequencyDomainFIRFilter